Chapter 16 PLC Function ApplicationsC2000-HS
16-153
Special D
Description of Function
ttributes
bit Speed mode Location mode Torque mode Homing mode
D1126 + 10*N
0
Frequency command
arrival
Position command
attained
Torque command
attained
Zero command
completed
RO
1
Clockwise Clockwise Clockwise Clockwise
Counterclockwise: Counterclockwise: Counterclockwise: Counterclockwise:
2 Warning Warning Warning Warning
3 Error Error Error Error
5 JOG
6 Quick Stop Quick Stop Quick Stop Quick Stop
7 Servo ON Servo ON Servo ON Servo ON
D1127 + 10*N
Actual frequency
Actual position
(with numbers)
Actual torque
(with numbers)
-
RO
D1128 + 10*N - - -
※ N = 0 – 7
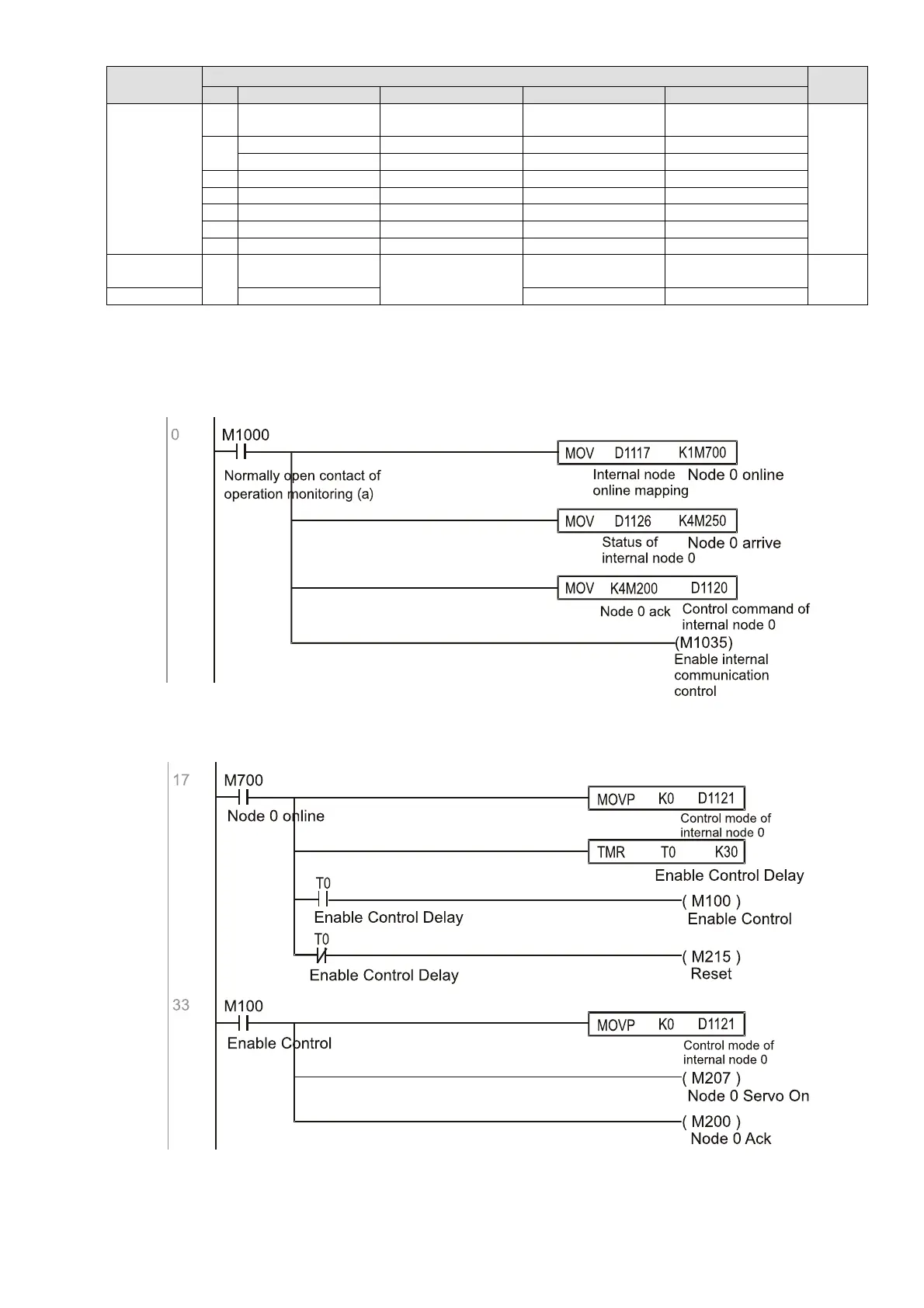
Example: Assume it is desired to control slave station 1 operation at frequencies of 30.00Hz and
60.00 Hz, status, and online node correspondences:
When it is judged that slave station 1 is online, delay 3 sec. and begin control

 Loading...
Loading...