Chapter 12 Description of Parameter SettingsC2000-HS
12.2-00-13
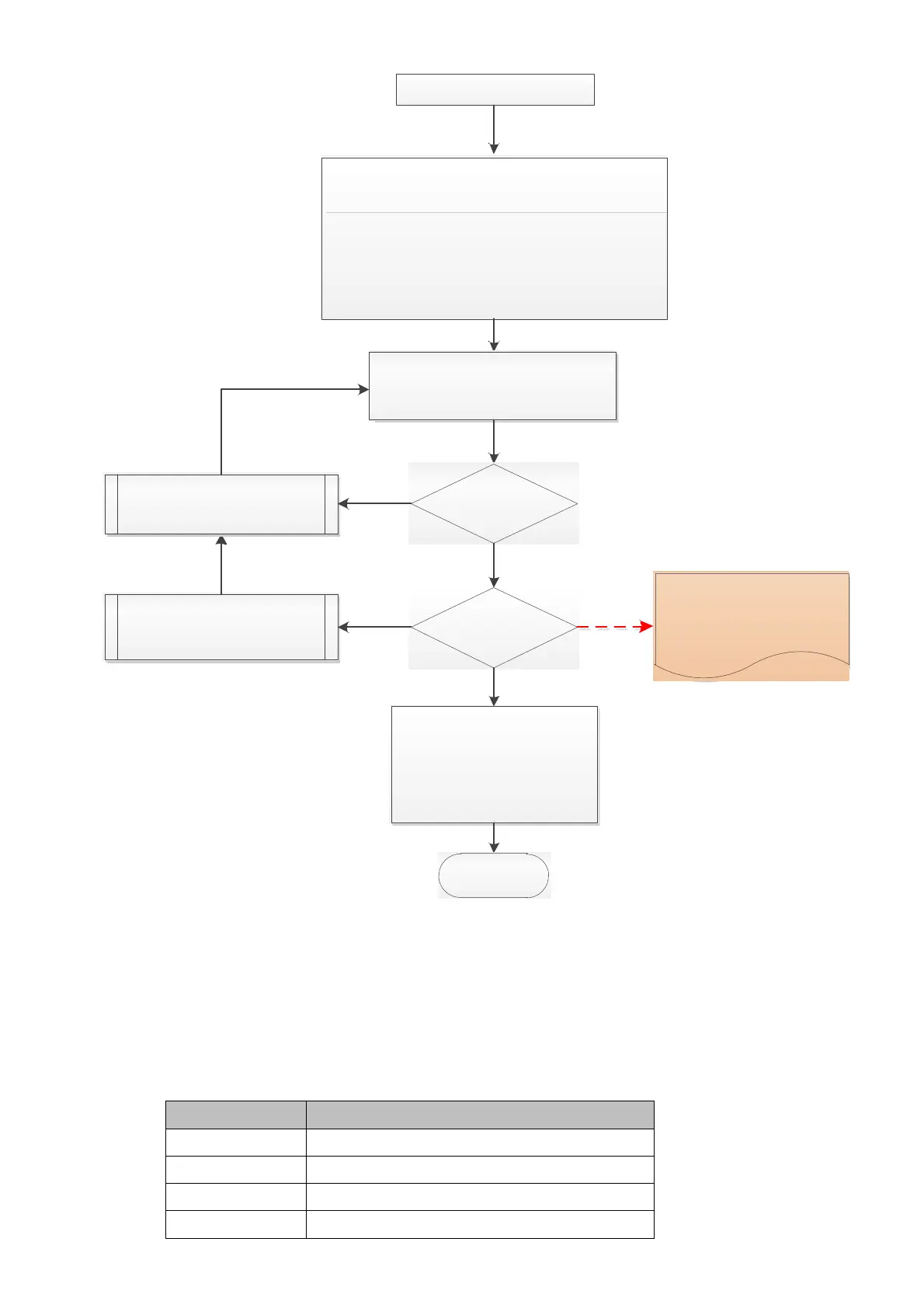
Press’STOP’
1) Press 'ENTER’ at the display
screen of the last inertia
estimation of Pr.11-01
2) Set Pr.11-00=bit 1 as 0
3) Set the accel./decel time to
default value
9.No-load
Trial Run
7.Re-power after Power Off
8.PM Motor Inertia Estimation
1) Pr.00-11=4 FOCPG control
2) Set the running frequency to 2/3 of the motor rated
frequency.
3) Set the accel./decel. time as 1/10 of the default value.
(Adjust the accel./decel time based on the load inertia.
The smaller the inertia is, the shorter the accel./decel.
time will be)
4) Check connection of the load and the motor
5) Pr.11-00=bit1=1 inertia estimation(for FOCPG mode)
Observe if the inertia
estimation of Pr.11-01
has converged to small
changes?
Continue forward/backward running,
so the inertia estimation can
converge to small changing
differences.
NO
YES
Press’RUN’
Rapid forward/reverse run repeatedly
Observe the system inertia per-unit
Pr.11-01
Observe if Pr.11-
01 has changed?
If the value does not change (inertia
estimation error), decrease the
frequency command, and re-estimate
the inertia
Different load inertia will have
different converging speed. The
larger the intertia is, the slower
it will converge. Which needs to
estimate for several times.
NO
YES
Basic Motor Parameters Adjustment
1. Parameter reset:
Reset Pr.00-02=10 (60Hz) to the default value.
2. Select PM motor type:
Pr.05-33=1 (SPM) or 2 (IPM)
3. Motor nameplate parameter setting:
Parameter Description
Pr.01-01 Rated frequency (Hz)
Pr.01-02 Rated voltage (V
AC
)
Pr.05-33 PM motor type (IPM or SPM)
Pr.05-34 Rated current (A)
 Loading...
Loading...