Chapter 15 CANopen Overview C2000-HS
15-24
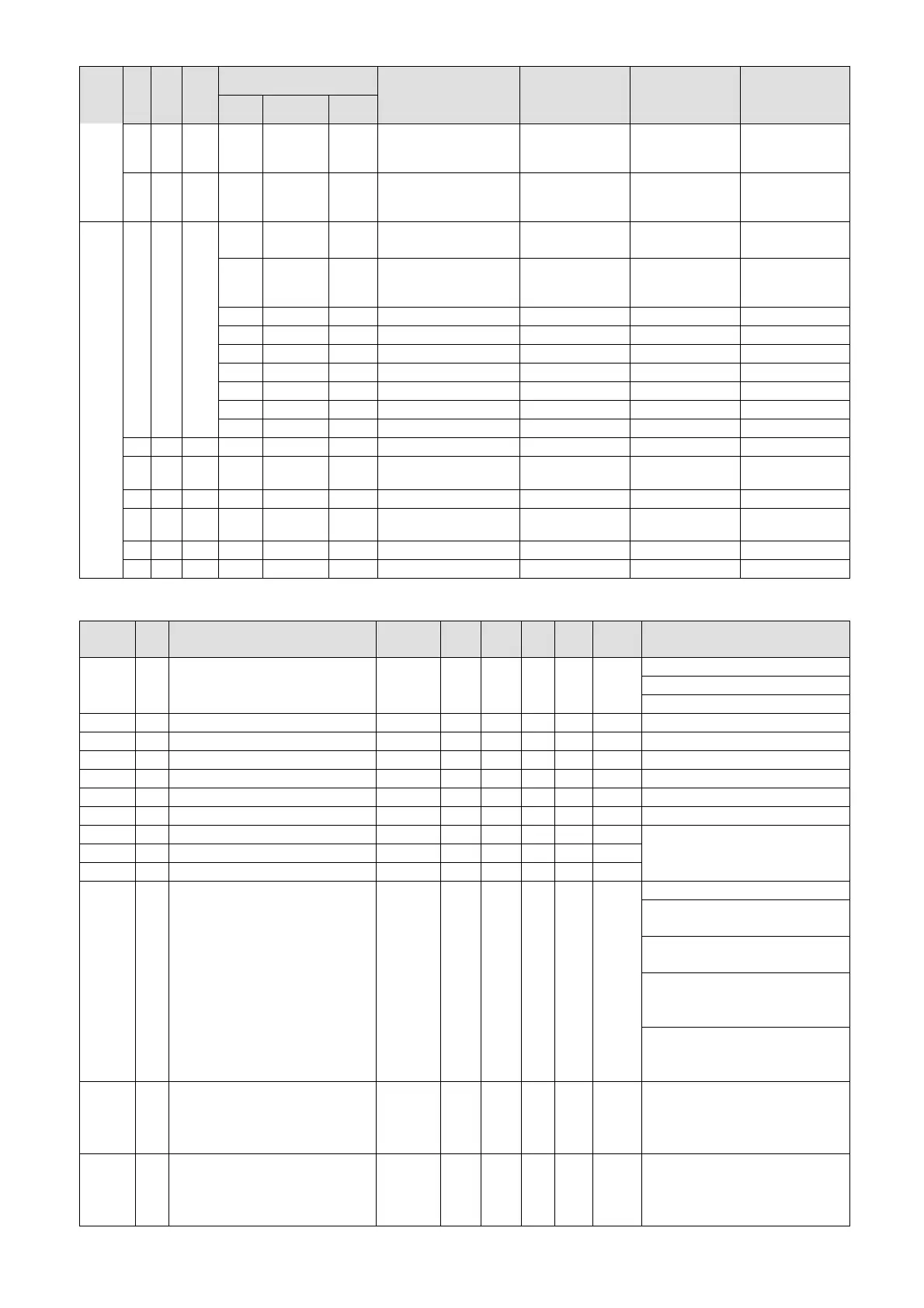
Index sub R/W Size
Descriptions
Speed Mode Position Mode Home Mode Torque Mode
bit DefinitionPriority
07h RW U16
Torque
command
(signed decimal)
08h RW U16
Speed limit
(unsigned
decimal)
2061h
01h R U16
0
Arrive Frequency attained Position attained Homing complete Torque attained
1
Dir
0: Motor FWD run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
0: Motor FWD
run
1: Motor REV run
2
Warn Warning
Warning Warning Warning
3
Error Error detected
Error detected Error detected Error detected
4
5
JOG JOG JOG JOG JOG
6
Qstop Quick stop Quick stop Quick stop Quick stop
7
Power On Switch ON Switch ON Switch ON Switch ON
15–8
02h R
03h R U16
ctual output
frequency
ctual output
frequency
ctual output
frequency
ctual output
frequency
04h R
05h R S32
ctual position
(absolute)
ctual position
(absolute)
ctual position
(absolute)
ctual position
(absolute)
06h R
07h R S16
ctual torque
ctual torque
ctual torque
ctual torque
DS402 Standard
Index Sub Definition
Default
R/W Size Unit
PDO
Map
Mode Note
6007h 0 Abort connection option code 2 RW S16 Yes
0: No action
2: Disable Voltage
3: Quick stop
603Fh 0 Error code 0 R0 U16 Yes
6040h 0 Control word 0 RW U16 Yes
6041h 0 Status word 0 R0 U16 Yes
6042h 0 vl target velocity 0 RW S16 rpm Yes vl
6043h 0 vl velocity demand 0 RO S16 rpm Yes vl
6044h 0 vl control effort 0 RO S16 rpm Yes vl
604Fh 0 vl ramp function time 10000 RW U32 1ms Yes vl
Unit must be 100ms, and
check if the setting is 0.
6050h 0 vl slow down time 10000 RW U32 1ms Yes vl
6051h 0 vl quick stop time 1000 RW U32 1ms Yes vl
605Ah 0 Quick stop option code 2 RW S16 No
0: Disable drive function
1: Slow down on slow down
ramp
2: Slow down on quick stop
ramp
5: Slow down on slow down
ramp and stay in QUICK
STOP
6: Slow down on quick stop
ramp and stay in QUICK
STOP
605Ch 0
Disable operation option
code
1 RW S16 No
0: Disable drive function
1: Slow down with slow down
ramp; disable the drive
function
6060h 0 Mode of operation 2 RW S8 Yes
1: Profile Position Mode
2: Velocity Mode
4: Torque Profile Mode
6: Homing Mode
 Loading...
Loading...