Chapter 12 Description of Parameter SettingsCP2000
12.1-12-7
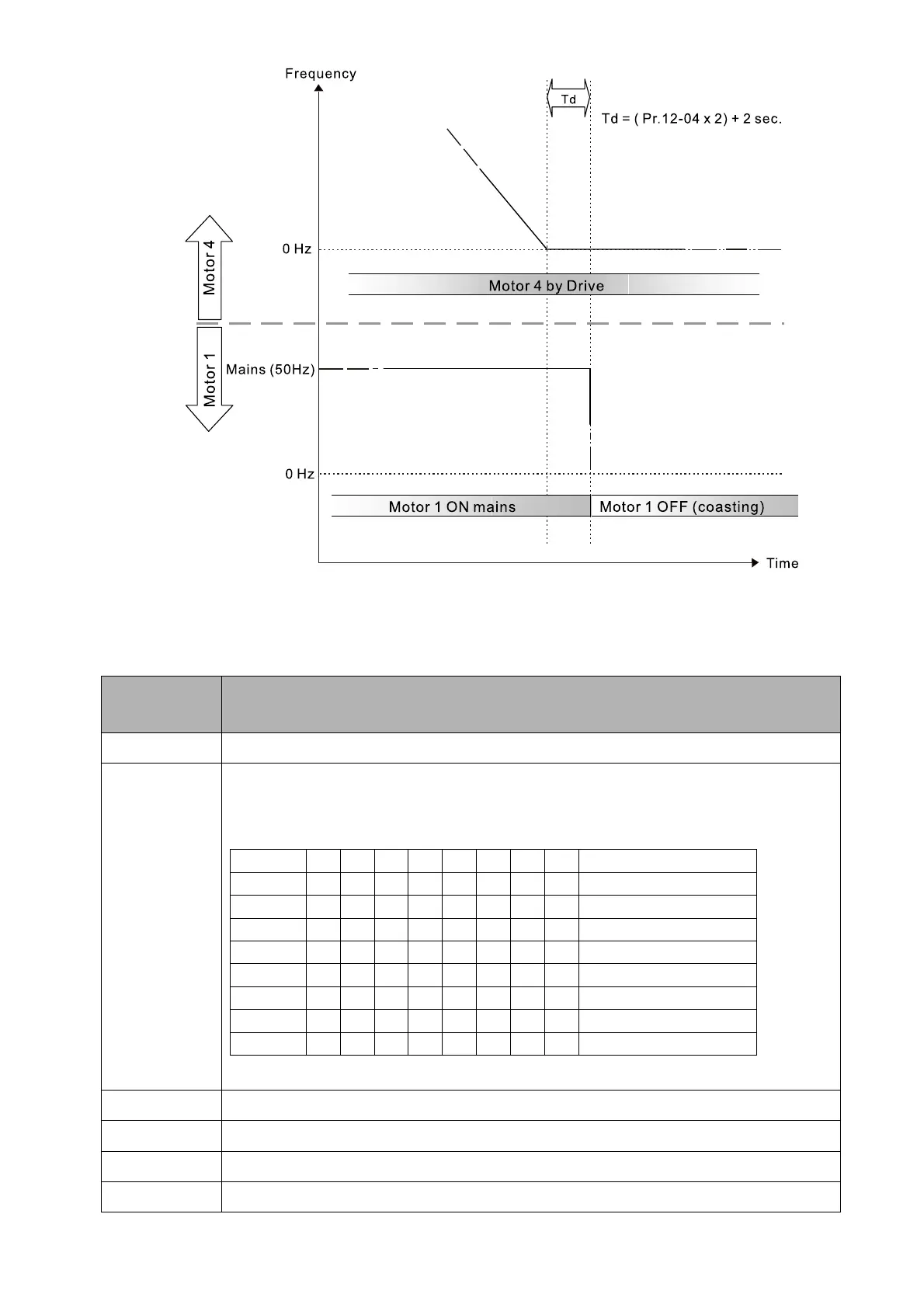
Diagram 12-6: Sequence of switching motors at Fixed Quantity Circulation with PID
– Decreasing Demands
Parameter Setting
Parameter
setting
Description
Pr.12-00=2 Choose Fixed Quantity Circulation with PID
Pr.12-01=X
Number of Motors: maximum four motors. After you set the number of motors to be
connected at the same time, the multi-function output terminals automatically follow the
setting as shown in the table below.
Pr.12-01 01 01 02 02 03 03 04 04
Pr.02-13 55 55 55 55 55 55 55 55 Motor 1 by Drive
Pr.02-14 56 56 56 56 56 56 56 Motor 1 by Mains
Pr.02-15 57 57 57 57 57 57 Motor 2 by Drive
Pr.02-36 58 58 58 58 58 Motor 2 by Mains
Pr.02-37 59 59 59 59 Motor 3 by Drive
Pr.02-38 60 60 60 Motor 3 by Mains
Pr.02-39 61 61 Motor 4 by Drive
Pr.02-40 62 Motor 4 by Mains
Table 2: Setting of Multi-function Output Terminal on Circulating Motors
Pr.12-03=X Delay Time due to the Acceleration (or the Increment) at Motor Switching (unit: sec.)
Pr.12-04=X Delay Time due to the Deceleration (or the Decrement) at Motor Switching (unit: sec.)
Pr.12-05=X Delay time while Fixed Quantity Circulation at Motor Switching with PID (unit: sec.)
Pr.12-06=X Frequency when switching motors at Fixed Quantity Circulation (Hz)