7
2 Funktionsweise
DE
2 Funktionsweise
2.1 Arbeitsweise
Sie haben mit dem Saugroboter „Tracker“ ei-
nen vollautomatisch arbeitenden Saugroboter
erworben.
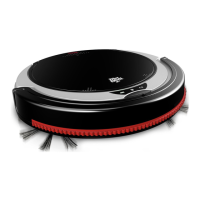
Ihr Roboter durchläuft beim Reinigen die fol-
genden 3 Modi:
„Zufallsmodus“ (Abb. 4/A, Abb. 5/B)
„Kreiselmodus“ (Abb. 4/B)
„Kantenmodus“ (Abb. 5/A)
Falls das Gerät am Ende des „Kantenmodus“
nicht abgeschaltet wird, beginnt der Zyklus er-
neut mit dem „Zufallsmodus“.
Diese Programmabfolge ermöglicht das lü-
ckenlose Reinigen auf der Grundlage sich
überlappender Bahnen. Voraussetzung hier-
für ist, dass der Raum nicht zu groß ist und
das Gerät im „Kreiselmodus“ nicht zu früh auf
ein Hindernis trifft.
Falls das Gerät auf ein Hindernis trifft, regist-
riert dies der Stoßfänger und es ändert die
Fahrtrichtung. Falls das Gerät im „Kreiselmo-
dus“ auf ein Hindernis trifft, geht es sofort in
den „Kantenmodus“ über.
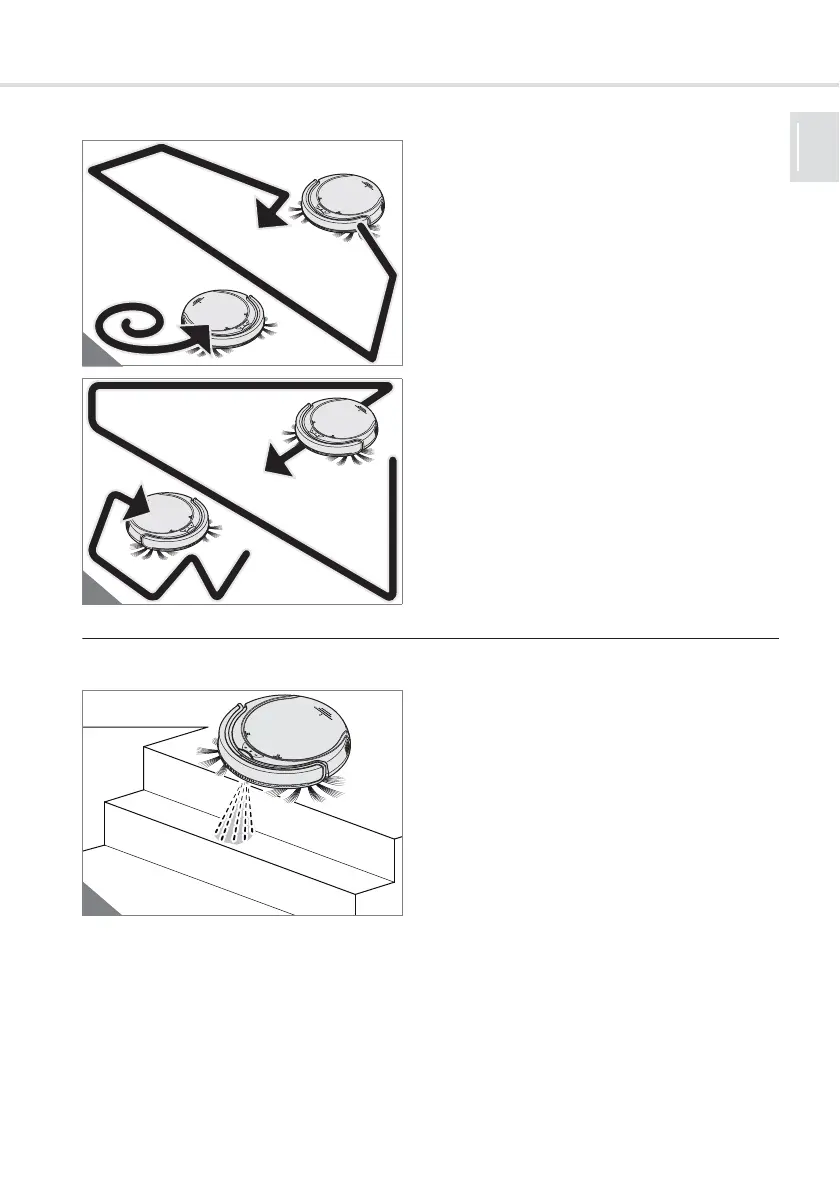
2.2 Absturzsicherung
Ihr Saugroboter erkennt mithilfe von
3 Fallsensoren selbstständig vor ihm liegende
Abgründe (Abb. 6). Er ändert daraufhin seine
Fahrtrichtung und reinigt in entgegengesetz-
ter Richtung weiter.
Tieferliegende Flächen, wie z. B. Treppenstu-
fen, werden erkannt und somit von der Reini-
gung ausgespart.
Die Empfindlichkeit der Fallsensoren können
Sie einstellen, ZKapitel 6.1, „Empfindlichkeit
der Fallsensoren einstellen“.