OS Function Block
March 2006
5-115
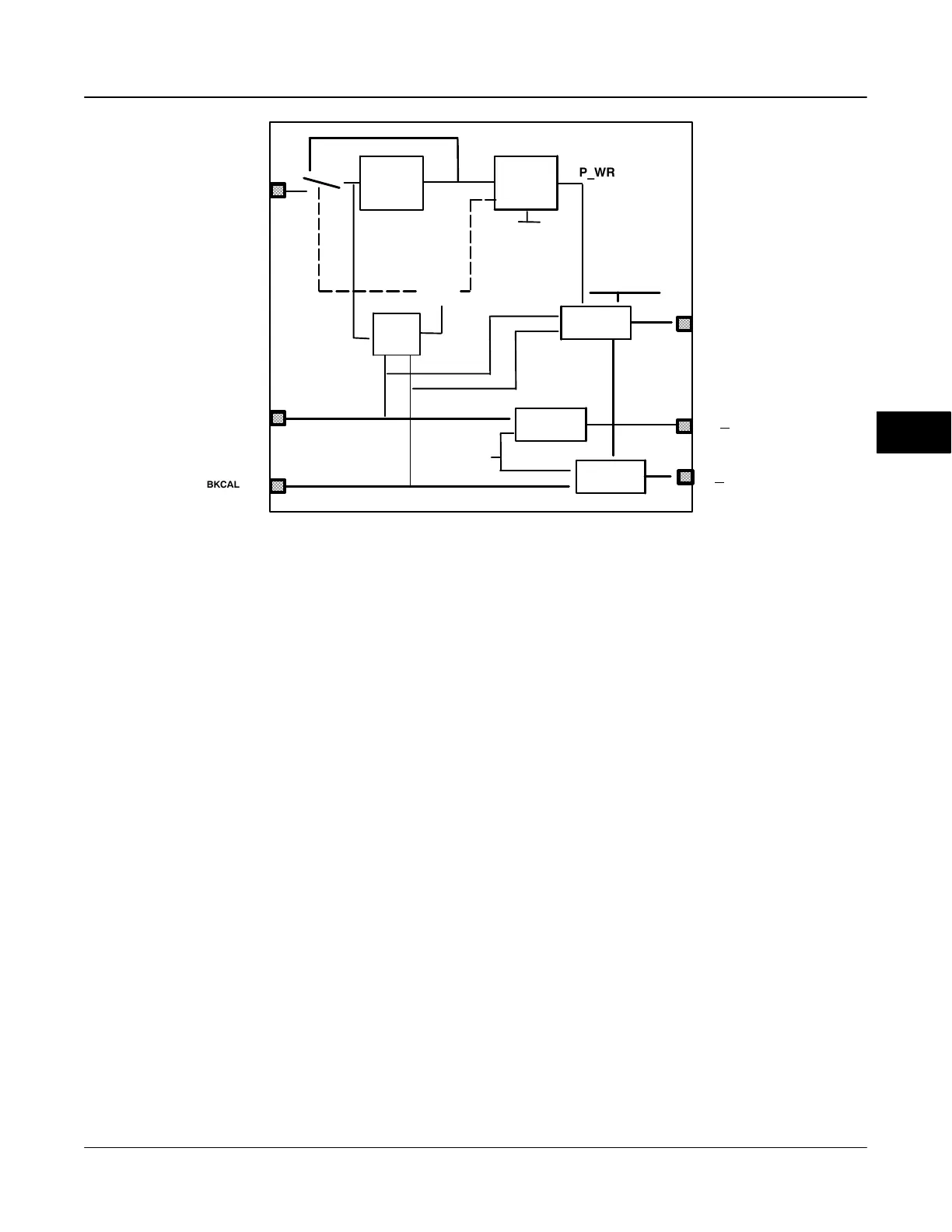
Figure 5-19. Output Splitter Function Block Schematic Diagram
Setpoint
Limiting
OUT 1
CAS_IN
OUT
2
BKCAL_OUT
BKCAL_IN_1
IN_ARRAY
BAL_TIME
LOCKVAL
SP
Setpoint
Rate
Limiting
Calculate
Ouput
Balance
Ouput
Balance
Ouput
Shed
Mode
BKCAL_IN_2
MODE
SP_WRK
OUT_ARRAY
SP_RATE_DN
SP_RATE_UP
F
F
F
F
F
"
"
"
F
A
"
A
"
"
"
"
"
"
"
"
"
A
"
A
"
Automatic (Auto)—The block output (OUT)
reflects the target operating point specified by the
setpoint (SP) parameter.
Cascade (Cas)—The SP parameter is set by
another function block through a connection to
CAS_IN. The SP value is used to set the OUT
parameter automatically. This is the most frequently
used mode in the digital valve controller.
The block’s normal mode is Cascade (Cas). You can
isolate the block for testing by using Automatic (Auto)
mode and adjusting the setpoint.
When a block attached to an output requests
initialization, one of the following actions might occur:
When the other output is not in Cas mode, the
block attached to the input is initialized.
When the other output is in Cas mode, this
output returns to the value calculated from its slope in
a specified time period.
Status Handling
Sub-status value received at CAS_IN [14] is passed to
both outputs, except for those used in the cascade
handshake. An IFS goes to both outputs. The status
option IFS if Bad CAS_IN is available.
If the Status Option to Propagate failure is set, the
block propagates device failure only if both BKCAL_IN
show failed status. Otherwise the upstream cascade
would be broken by a failure at either output.
The statuses of OUT_1 [8] and OUT_2 [9] are
determined by the statuses of BKCAL_IN_1 and
BKCAL_IN_2 and the actual mode of the block.
When a BKCAL_IN input sees that its downstream
block is not in Cas mode, the Splitter function block
sets the corresponding OUT value to the BKCAL_IN
value. However, this may not be the same value that
is calculated by the splitter algorithm. When the mode
of the downstream block is changed to Cas, the
difference between the calculated output and the
back-calculation input is computed and the difference
is added to the calculated output. Next, the difference
is reduced to zero over the time defined by the
BAL_TIME parameter.
When both BKCAL_IN_1 and BKCAL_IN_2 indicate
that the downstream blocks are not in Cas mode or
have Bad status, the first downstream block that goes
to Cas mode causes the upstream block to initialize so
that there is no difference between the calculated
output and the back-calculation input. This provides
bumpless transfer for the first downstream block.
Limit Handling
The splitter function block is designed to combine the
limit information from the two downstream blocks into
5
 Loading...
Loading...







