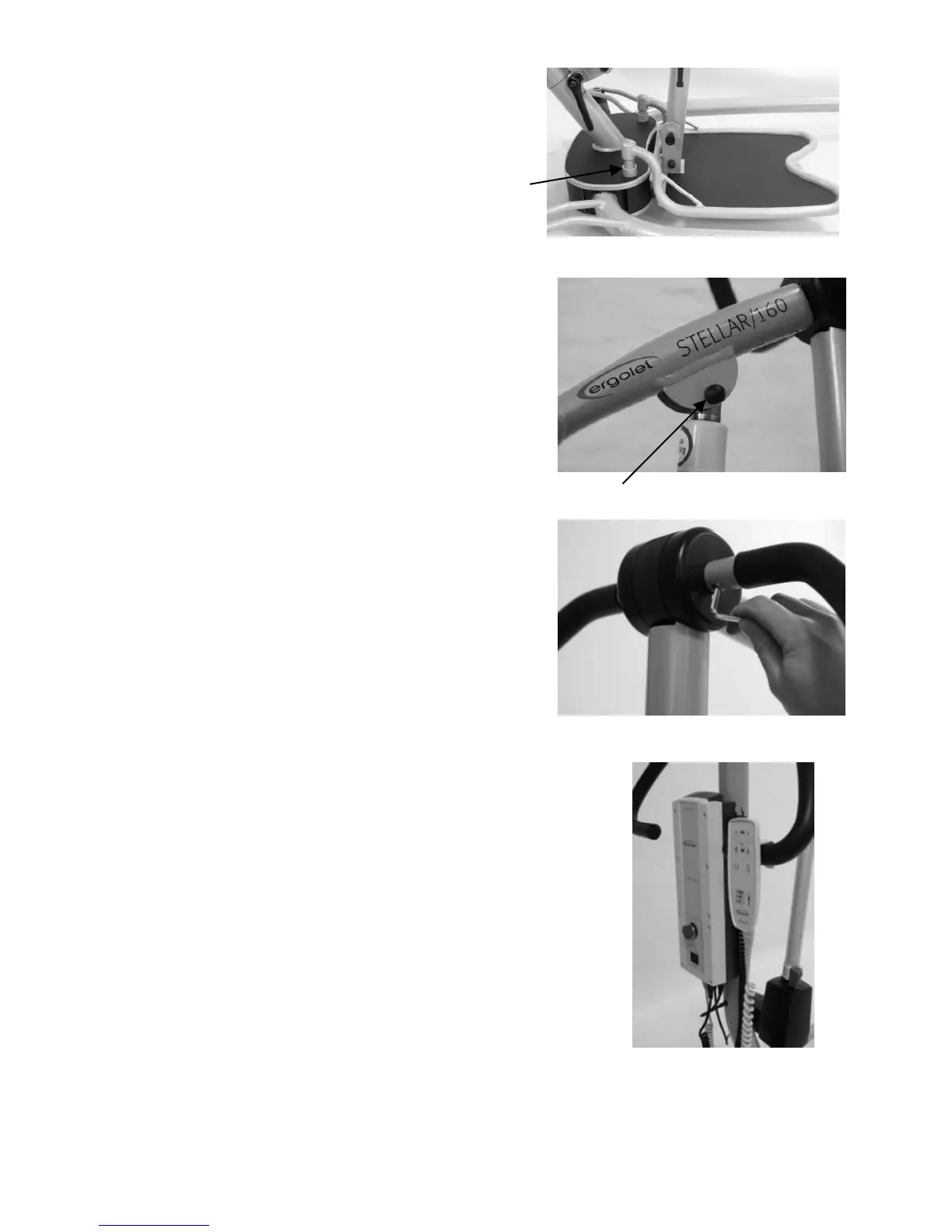
3. Mount the foot plate into the corresponding
holes on the leg base.(Fig. 1.6D)
4. Fit the actuator piston rod to the lifting arm.
Use the Allen key and the spanner to tighten
the bolt/nut. (Fig. 1.6E). Put the cap on the
nut.
5. Fit the handle on the mast with a screw and
tighten with the Allen key. (Fig 1.6F)
6. The hand control, lifting arm and electrical leg
spreader are connected to the control box.
(Fig 1.6G)
(See section 2.1 – functions / connection).
 Loading...
Loading...