TXT
Discovery Set
ROBOTICS
27
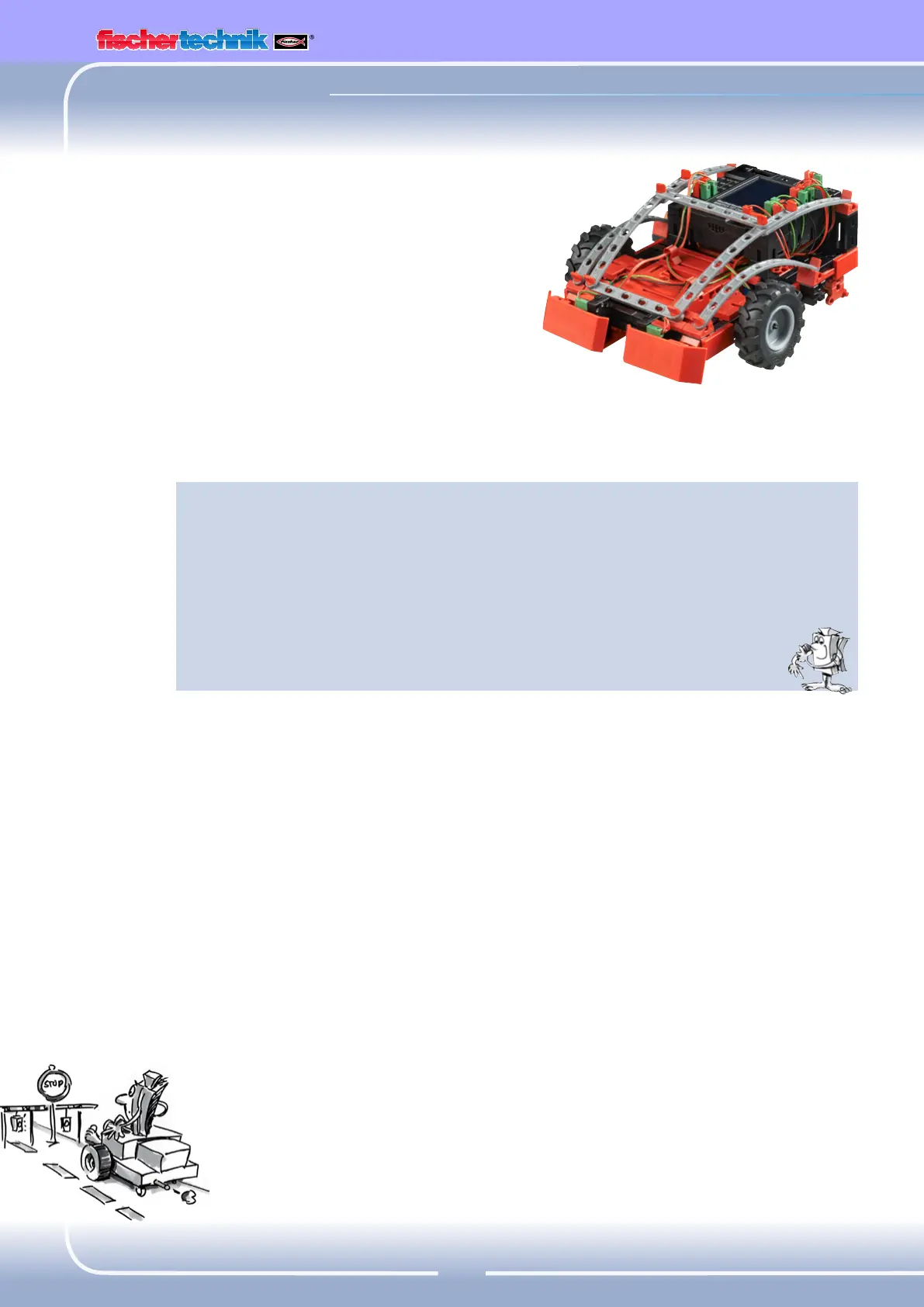
Hindrance Detector
Your robot can now move straight ahead
and turn. And up to now it does this
precisely as described in your program.
However, a robot should actually be
able to react as independently as
possible. This is why we now want to
have it react to obstacles with the aid a bumper.
First, build the model as described in the assembly instructions.
Task:
The hindrance detector should move straight ahead. As soon as
it hits an obstacle with its left bumper, it should stop, move back
a short distance, turn slightly to the right and then continue to
move straight ahead. If it hits an obstacle with its right bumper,
it should move around the obstacle to the left in the same
manner.
Programming Tips:
Left bumper: Pushbutton I6; Right bumper: Pushbutton I5
Use a subroutine for each of the various actions: forwards / reverse, go
around to left / right.
Ensure that the robot does not move the same number of pulses when
moving to the right and to the left; otherwise it could get into a corner
and not be able to get out. However if the number of pulses is different,
it will be able to work its way out of a corner.
You can find the finished program here:
Hindrance_detector.rpp
 Loading...
Loading...
