FOXTECH AYK-250 User Manual
©
2021 FOXTECH All Rights Reserved
15
Autopilot
After the rst ight, you can try to do autopilot.
You can choose to take o and land either by manual control or automatically.
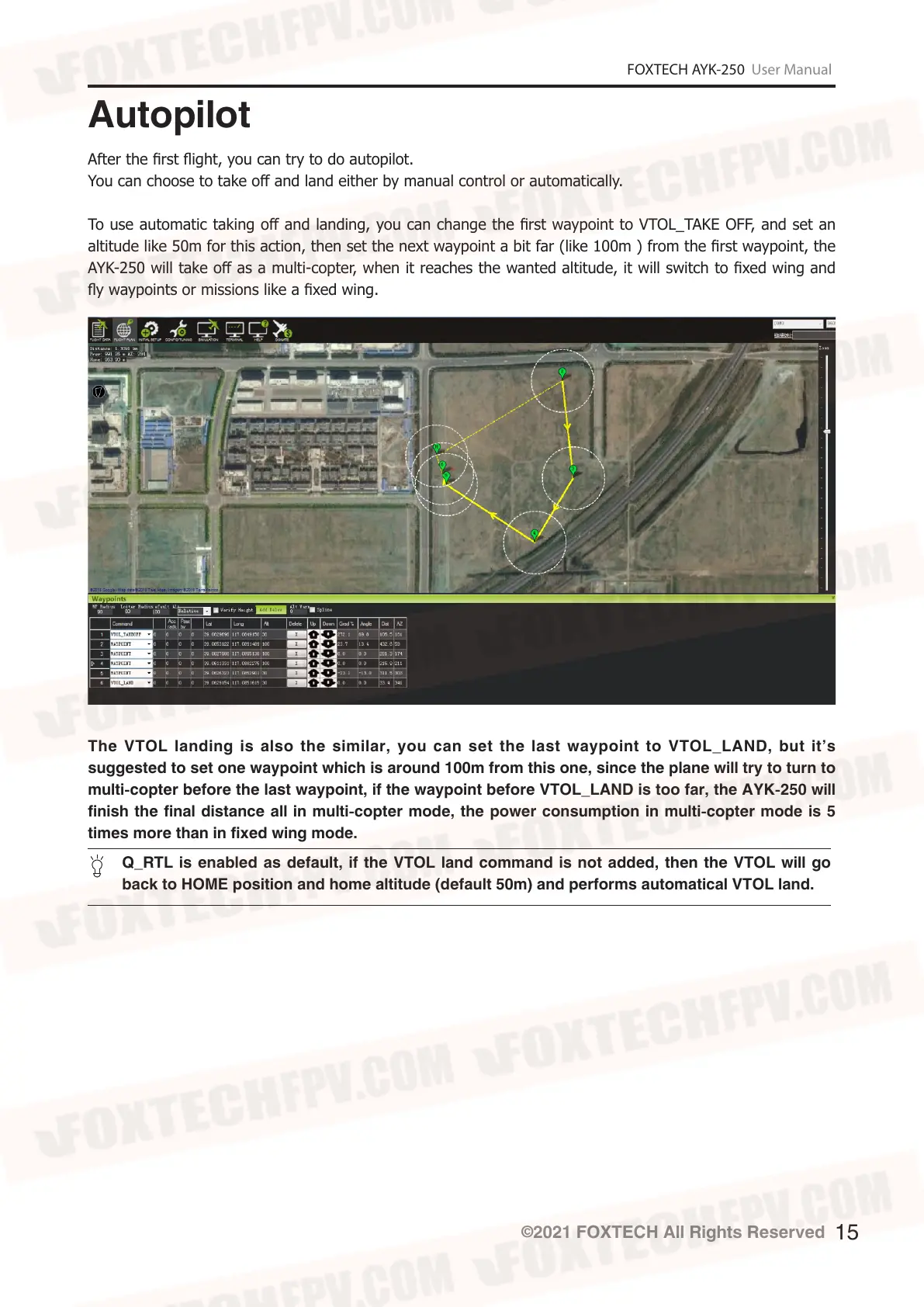
To use automatic taking o and landing, you can change the rst waypoint to VTOL_TAKE OFF, and set an
altitude like 50m for this action, then set the next waypoint a bit far (like 100m ) from the rst waypoint, the
AYK-250 will take o as a multi-copter, when it reaches the wanted altitude, it will switch to xed wing and
y waypoints or missions like a xed wing.
The VTOL landing is also the similar, you can set the last waypoint to VTOL_LAND, but it’s
suggested to set one waypoint which is around 100m from this one, since the plane will try to turn to
multi-copter before the last waypoint, if the waypoint before VTOL_LAND is too far, the AYK-250 will
finish the final distance all in multi-copter mode, the power consumption in multi-copter mode is 5
times more than in fixed wing mode.
Q_RTL is enabled as default, if the VTOL land command is not added, then the VTOL will go
back to HOME position and home altitude (default 50m) and performs automatical VTOL land.