Note the controller treats the point where the velocity passes through zero as the end of one move, and the
beginning of another move. IT is allowed, however it will introduce some time delay.
Trippoints
Most trippoints are valid for use while in the position tracking mode. There are a few exceptions to this; the AM
and MC commands may not be used while in this mode. It is recommended that MF, MR, or AP be used, as they
involve motion in a specified direction, or the passing of a specific absolute position.
Command Summary – Position Tracking Mode
COMMAND DESCRIPTION
AC n,n,n,n,n,n,n,n
Acceleration settings for the specified axes
AP n,n,n,n,n,n,n,n
Trippoint that holds up program execution until an absolute position has been reached
DC n,n,n,n,n,n,n,n
Deceleration settings for the specified axes
MF n,n,n,n,n,n,n,n
Trippoint to hold up program execution until n number of counts have passed in the
forward direction. Only one axis at a time may be specified.
MR n,n,n,n,n,n,n,n
Trippoint to hold up program execution until n number of counts have passed in the
reverse direction. Only one axis at a time may be specified.
PT n,n,n,n,n,n,n,n
Command used to enter and exit the Trajectory Modification Mode
PA n,n,n,n,n,n,n,n
Command Used to specify the absolute position target
SP n,n,n,n,n,n,n,n
Speed settings for the specified axes
Chapter 6 Programming Motion ▫ 78 DMC-40x0 User Manual
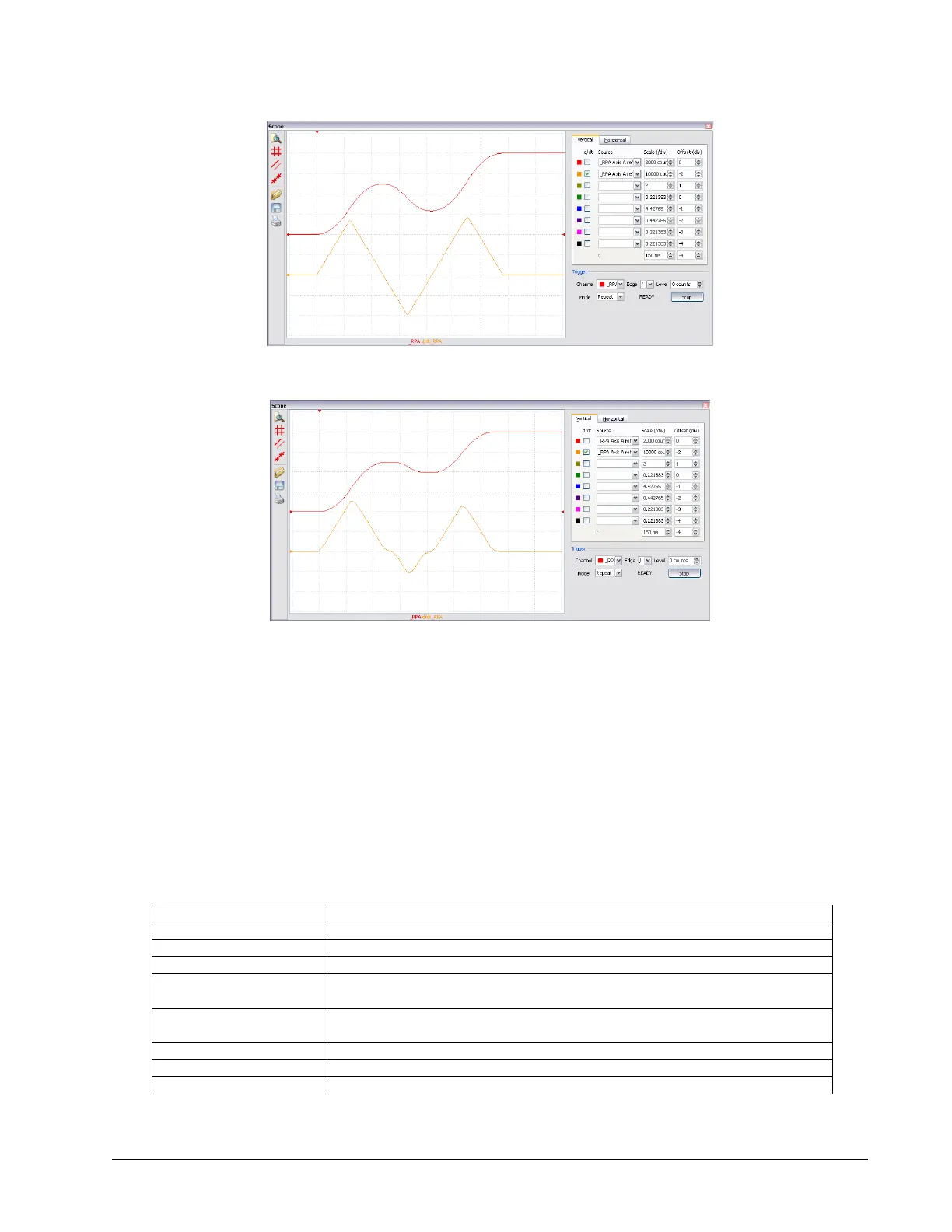
Figure 6.4: Position and Velocity vs Time (msec) for Motion 3
Figure 6.5: Position and Velocity vs Time (msec) for Motion 3 with IT 0.1