www.gemu-group.com68 / 76GEMÜ 1436 cPos
20 General information regarding control engineering
Proc I: T
n
Proc D: K
d
Proc T: T
v
Interpretation of the controller parameters according to
Ziegler-Nichols:
The following process is intended to help to adapt the control-
ler to the controlled system (however this process can only be
implemented on controlled systems where it is possible to let
the controlled variable oscillate of its own accord).
- Set the values for Kp (Proc P) and Tv (Proc T) to their min-
imum and the value for Tn (Proc I) to 0 (this leads to the
smallest possible effect of the positioner).
- Enter the desired set value manually in manual mode.
- Slowly increase Kp (Proc P) (decrease Xp), until the con-
trolled variable starts to oscillate harmoniously. Ideally, the
control circuit should be stimulated to oscillate by erratic
set value changes during the Kp adjustment.
- Note the Kp value thus obtained as a critical proportional
action factor Kp,krit.
- Following this, determine the duration of an oscillation as
Tkrit. If possible, use a stopwatch to measure several oscil-
lations and use the arithmetic mean as Tkrit.
- Use the values thus determined for Kp,krit and Tkrit to cal-
culate the missing Kp, Tn and Tv parameters according to
the following table.
Kp = Proc
P
Tn = Proc I Proc D Tv = Proc
T
P 0.50 x
Kp,krit
0 0 0
PI 0.45 x
Kp,krit
0.85 x Tkrit 0 0
PID 0.59 x
Kp,krit
0.50 x Tkrit 0.59 x
Kp,krit
0.12 x Tkrit
- If necessary, re-adjust the Kp and Tn values a little until the
control system shows satisfactory behaviour
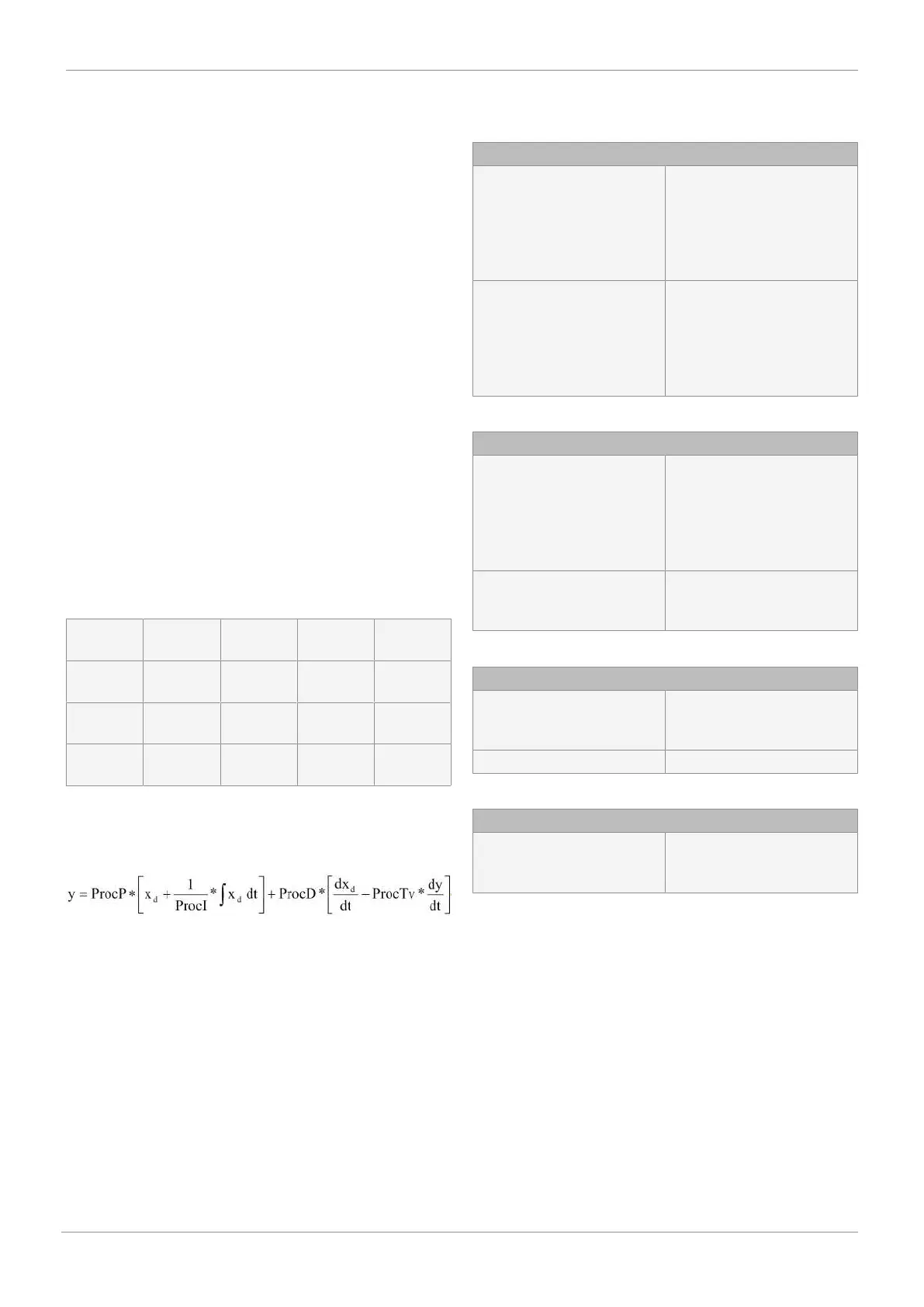
20.5 Differential equation of the product
20.6 Effects of the positioner parameters on the
automatic control system
Proc P:
Larger: The controller controls more
quickly but tends to oscillate
and is less precise in its con-
trol. The set value is achieved
in larger steps by increasing
the manipulated variable
Smaller: The controller controls more
slowly as the set value is
achieved in smaller steps by
reducing the correcting vari-
able. Control is more accur-
ate.
Proc I:
Larger: The positioner reacts more
slowly to changes to actual
values. Proc I should be in-
creased for actual value
sensors with relatively slow
output signals.
Smaller: The controller reacts more
quickly to changes to actual
values.
Proc D:
Larger: Slows down the manipulated
variable y when moving to the
set value. Control is slower.
Smaller: Set value is achieved faster.
Proc T:
Larger: The system deviation has a
longer effect although set
value = actual value