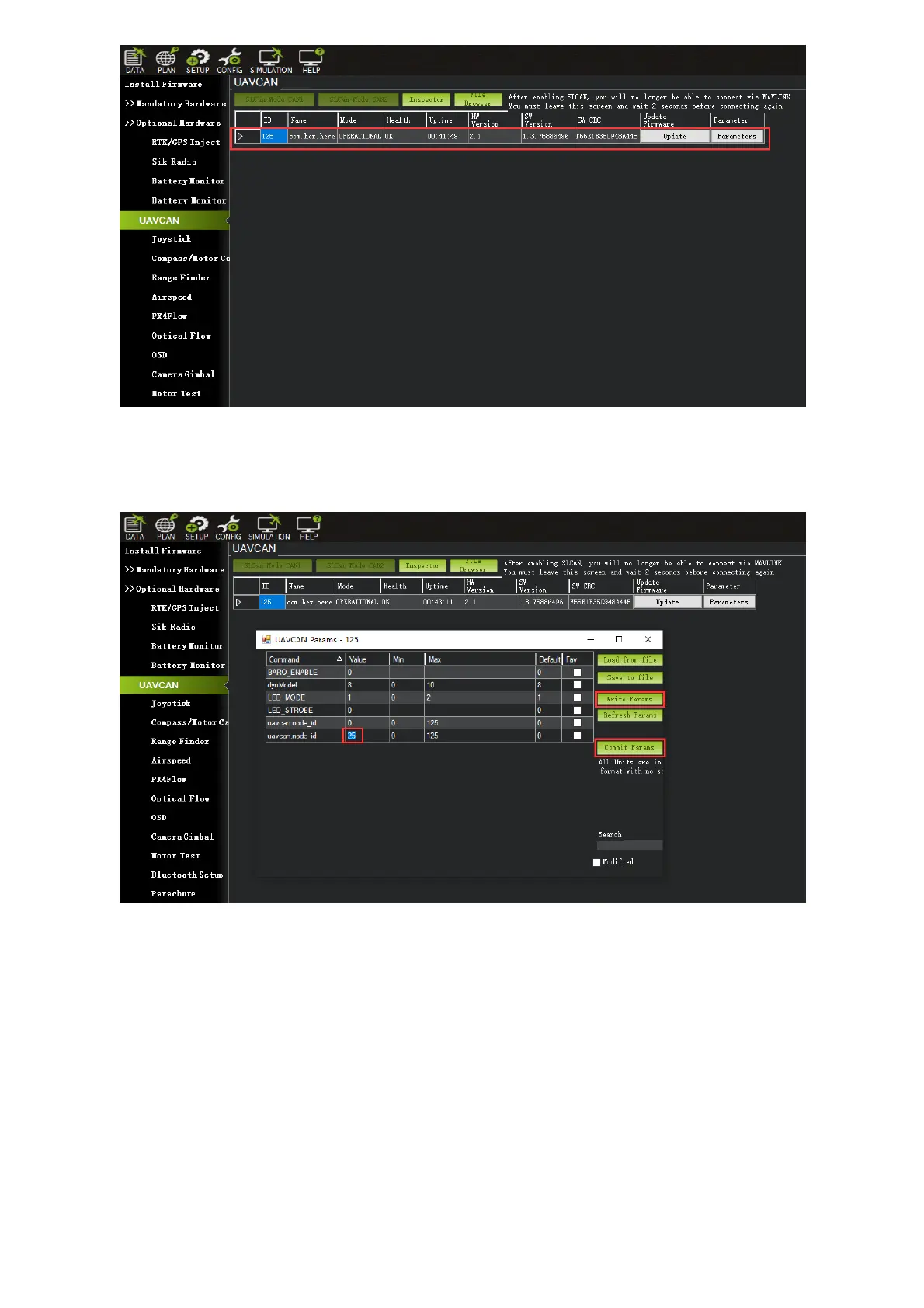
In parameter setting page, change uavcan.node_id to 0-125. Click before entering value. Then,
click "Commit Params" to save the changes and completed manual CAN id allocation.
After manually setting the two Here3 node ids in turn,Connect the two Here3 interfaces to the
flight controller CAN 1 and CAN 2, respectively.
Turn on the flight controller and connect it to Mission Planner. Go to "Config/Tuning > Full
Parameter List" and modify the following paramters:
CAN_D1_PROTOCOL: 1
CAN_D2_PROTOCOL: 1
CAN_P1_DRIVER: 1
CAN_P2_DRIVER: 1
GPS_TYPE: 9
GPS_TYPE2: 9