11 4
THEORY OF OPERATION
When the pinger is turned on (manually, or automatically when the
pinger is put in the water) a continuous series of acoustic pulses
(sound waves) are emitted from the transducer (black end) of the
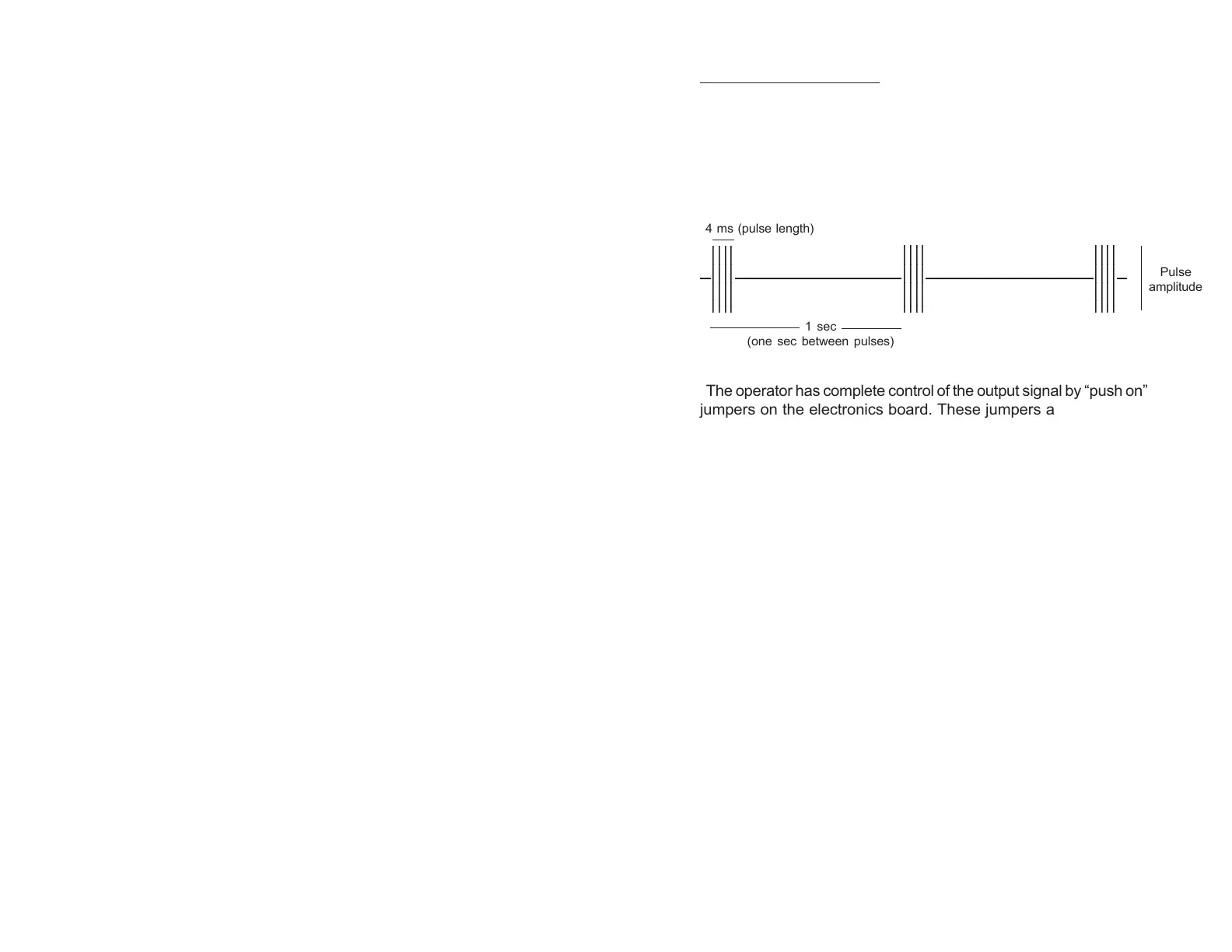
pinger. The pulses are of very short duration. The pulse length is
measured in milliseconds (ms), and travel out from the transducer
in all directions.
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
234
4 ms (pulse length)
1 sec
(one sec between pulses)
Pulse
amplitude
The operator has complete control of the output signal by “push on”
jumpers on the electronics board. These jumpers are set prior to
deployment of the pinger.
1) The pulse length (4 ms shown above) is operator adjustable
from 1 to 5 ms (may vary with model). The longer the pulse, the
further the signal will travel in the water; but the longer pulse
consumes more power and shortens battery life.
2) The repetition rate (sec between pulses) is also operator ad-
justable from .5 sec between pulses to 2 sec between pulses (1
sec between pulses shown above). A shorter rep rate does not
increase range; but it is easier to locate a pinger operating at .5
sec between pulses than one operating at two seconds between
pulses. A pinger operating at .5 sec consumes twice the battery
power of a pinger operating at a 1 sec rep rate.
3) Power output (pulse amplitude) is also operator adjustable
from .1 to 8 watts (may vary with model). The higher the output
power the farther the signal will travel through the water. Dou-
bling the output power increases the distance; but does not double
the distance. Doubling the output power reduces battery life in
half.
BLANK

 Loading...
Loading...