KINOVA® Gen3 lite robot User guide 136
Singularity configurations
This section describes the singularity configurations of the robot.
Singularity configurations overview
Singularities generally occur when a particular angular configuration of the robot causes axes to
be aligned, causing the robot to lose degrees of freedom and experience limitations in movement
in some directions while operating the robot in Cartesian mode. There are many ways that this
could potentially happen, and an exhaustive listing would be difficult. The following table highlights
some important classes of singularities for the robot, explaining how they occur and how the robot
behavior is altered near the singularity while in Cartesian mode.
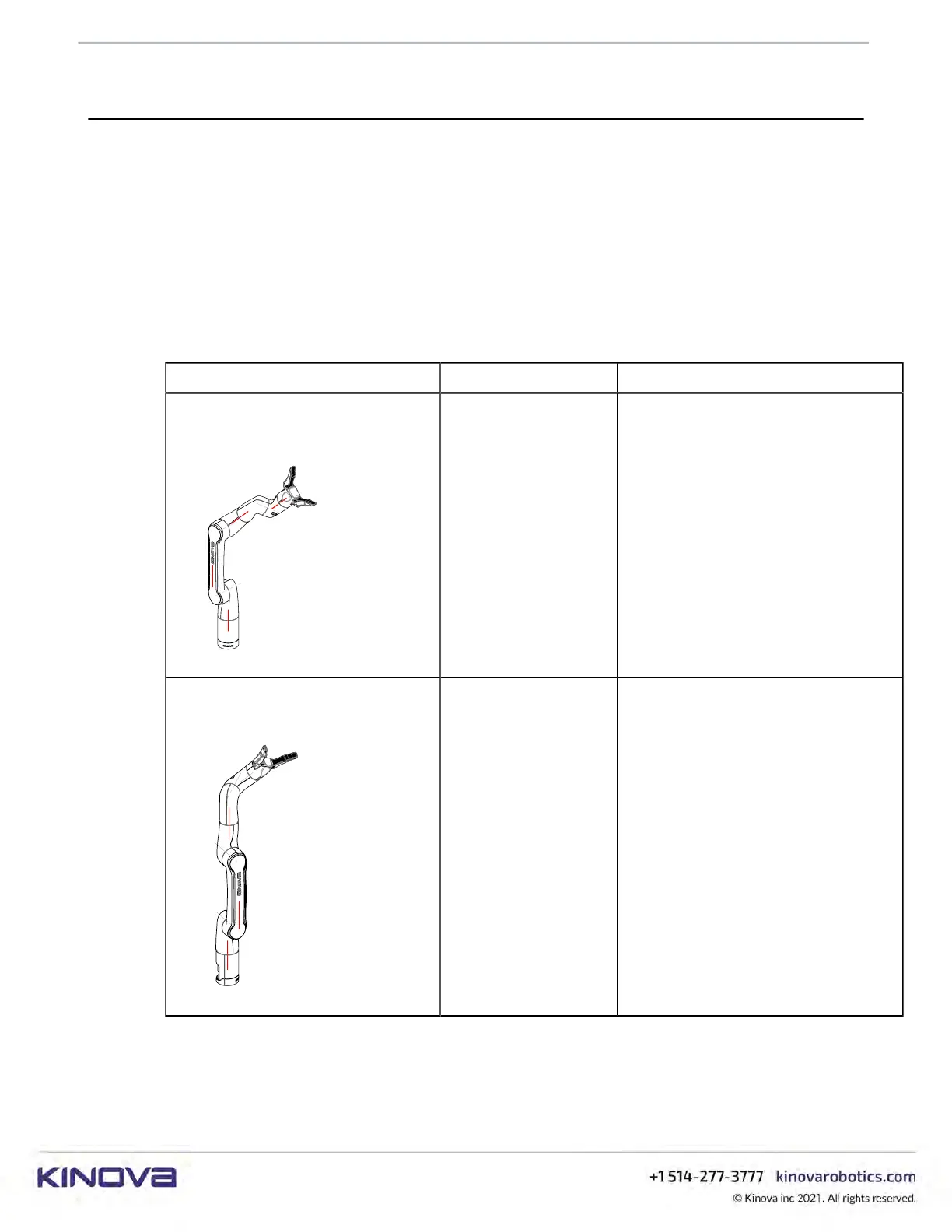
Table 51: Selected singularity configurations description
Singularity class Definition Description
Joint angles shown: [45, 0, 45, 45, 0,
45]
q2 = 0 and q5 = 0 The axis of joint 1 is aligned with the
joint 2 - joint 3 link. The axes of joints 4
and 6 are also aligned.
Joint angles shown: [45, 0, 0, 45, 45,
45]
q2 = 0 and q3 = 0 There is a 3-way alignment between the
axis of joint 1, the joint 2 - joint 3 link,
and the axis of joint 4.
 Loading...
Loading...

