KINOVA® Gen3 lite robot User guide 71
will stop at the outer boundary of the protection zone. The tool will be able to "slide" on the outer
surface of the zone but not enter inwards.
The tool can move within the surrounding envelope, but at a reduced speed.
Checkpoints and behavior of checkpoints
Additional checkpoints are used for protection zones and are defined for the robot at the centers of
actuators 3-6 and near the center of actuator 2.
For these checkpoints, the motion will stop at the outer surface of the protection zone. Checkpoints
will move within the envelope surrounding a protection zone, but at a reduced speed.
Protection zone shapes
Protection zones can be defined using one of three basic shape types:
• rectangular prism - position of center, length, width, and height dimensions, and angular
orientation of the rectangular prism are configurable
• cylindrical - position of center, radius, height, and angular orientation of the cylinder are
configurable.
• spherical - position of center and radius of sphere are configurable
A planar or disc-shaped protection zone can be defined by setting the thickness of the zone to zero
in either a rectangular prism or cylindrical protection zone.
Editing protection zones
Protection zones can be defined, edited, and deleted using either the Web App or the developer API.
Joint limits
The robot has joint limits used in robot high-level control. This impacts the position, speed,
acceleration, and torque applied for the joints.
Overview
When controlling the robot in high-level, the robot control library applies a number of different
joint limits for safety purposes. This includes limits on:
• joint position
• joint speed
• joint acceleration
• joint torques
The limits applied in a particular situation depend on the current high-level control mode.
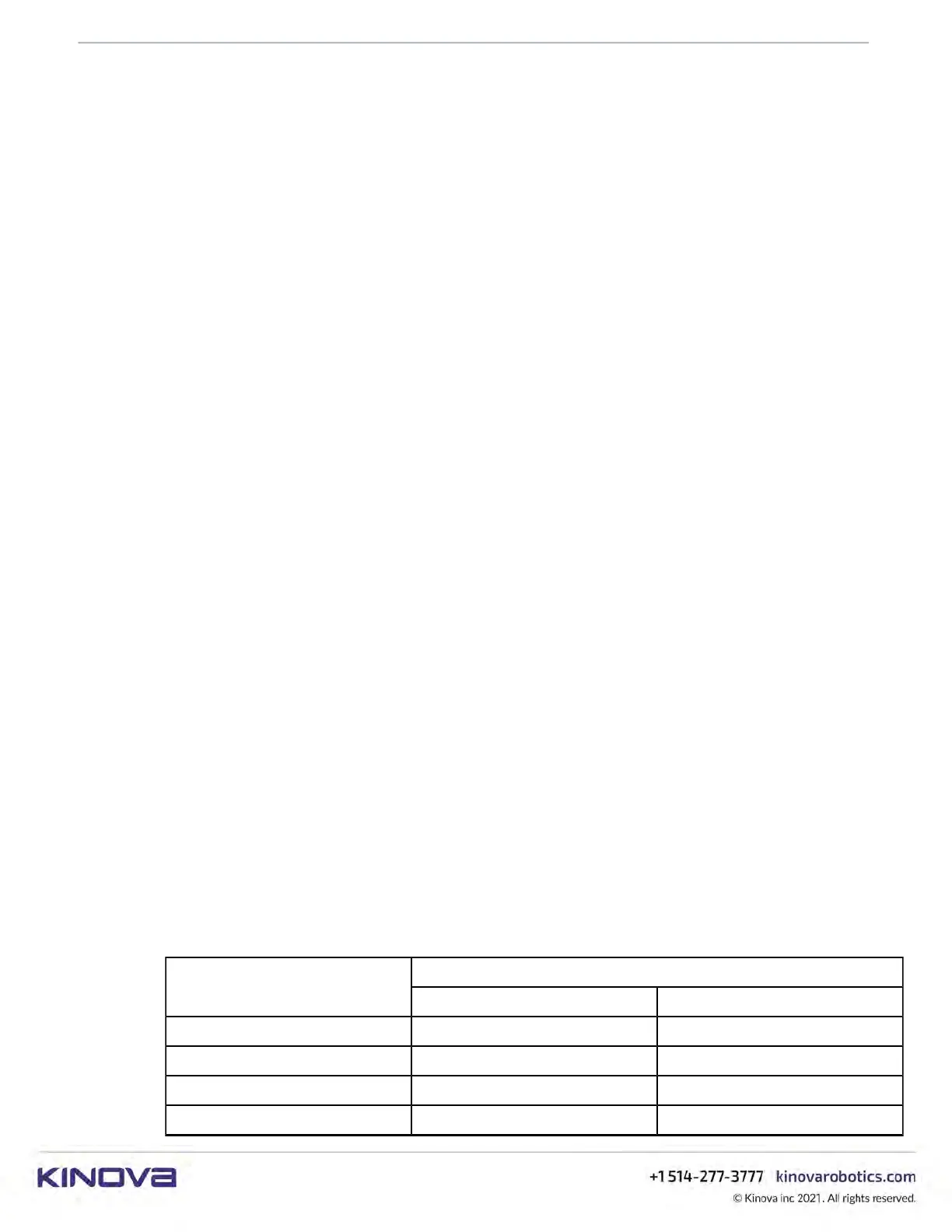
Gen3 lite robot joint limits
Table 25: Joint position limits
Joint limitsActuator
Lower limit Upper limit
1 - 154.1° + 154.1°
2 - 150.1° + 150.1°
3 - 150.1° + 150.1°
4 - 148.98° + 148.98°
 Loading...
Loading...

