Page 48
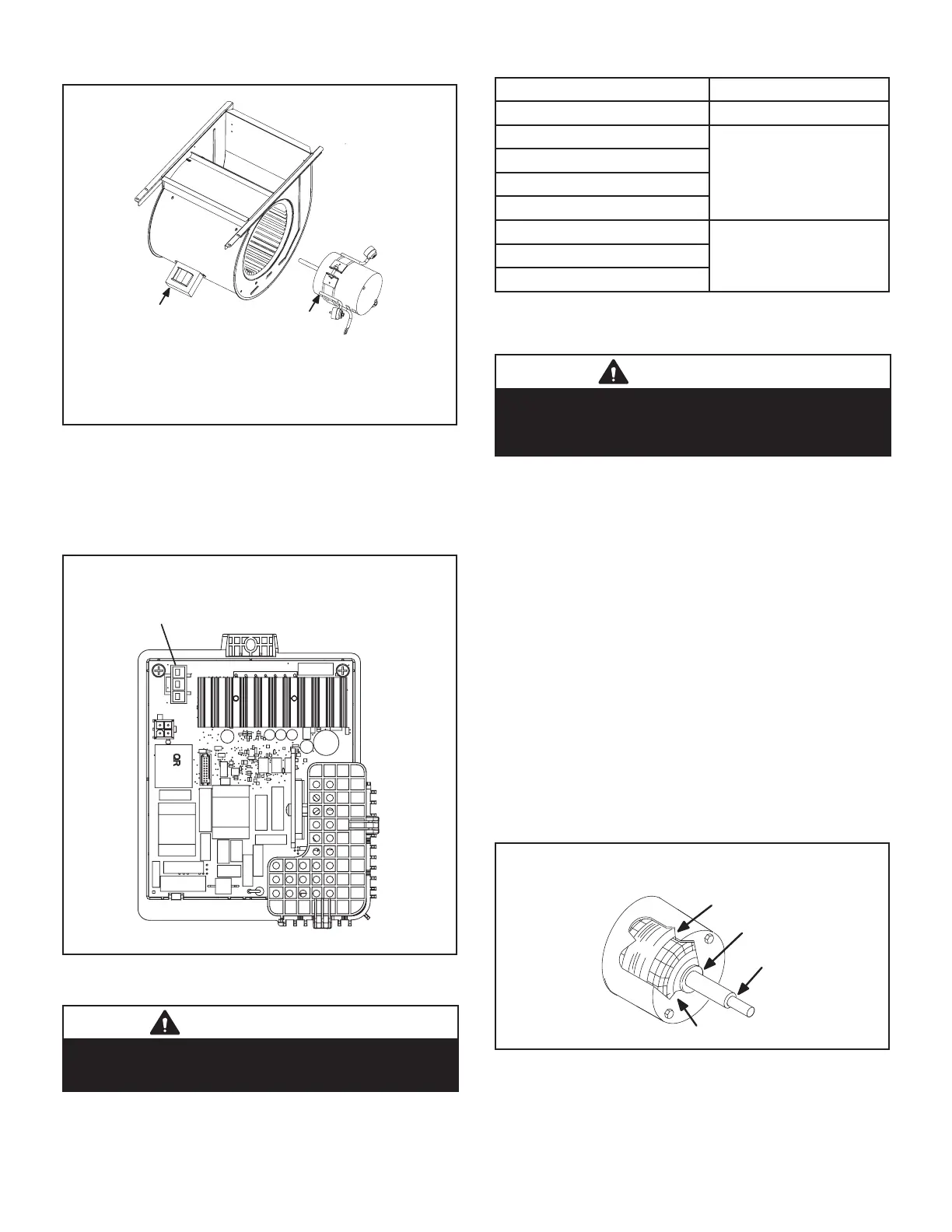
B- Indoor Blower Motor
Power Choke
(4 and 5 Ton Only)
Blower Motor
(B3)
To Remove Blower From Unit: Remove access panels,
Control box, Bolts and Wiring Jackplugs.
Then Slide Out Front of Unit.
FIGURE 7
Blower Drive
Some EL297UHV units will be equipped with a blower
drive shown in FIGURE 8 with LED codes for operation
in TABLE 12. The blower drive is not repairable. If it fails
replace the drive.
BLOWER DRIVE
Located in the control box
Three pin connector to
blower motor
FIGURE 8
IMPORTANT
Earlier ECM motors used on other Lennox furnace
models are not interchangeable with motors used
on the EL297UH furnace line.
TABLE 12
Led* Meaning
1 short blink Normal heartbeat
2 short blinks
Drive fault
replace drive
3 short blinks
4 short blinks
5 short blinks
1 long blink + 1short blink
Temporary fault
(see troubleshooting
page 52)
1 long blink + 2 short blinks
1 long blink + 3 short blinks
* Do not touch or remove drive for replacement until all
blinking lights are o. Blinking light(s) indicates drive still
has power.
WARNING
During blower operation, the ECM motor emits
energy that may interfere with pacemaker operation.
Interference is reduced by both the sheet metal
cabinet and distance.
The motor communicates with the integrated control via
a 2-way serial connection. The motor receives all neces-
sary functional parameters from the integrated control and
does not rely on a factory program like traditional variable
speed motors. EL297UHV units use a three-phase, elec-
tronically controlled D.C. brushless motor (controller con-
verts single phase a.c. to three phase D.C.), with a perma-
nent-magnet type rotor (FIGURE 9). Because this motor
has a permanent magnet rotor it does not need brushes
like conventional D.C. motors.
The stator windings are split into three poles which are
electrically connected to the controller. This arrangement
allows motor windings to turn on and o in sequence by
the controller.
A solid-state controller is permanently attached to the mo-
tor. The controller is primarily an A.C. to D.C. converter.
Converted D.C. power is used to drive the motor. The con-
troller contains a microprocessor which monitors varying
conditions inside the motor (such as motor workload).
STATOR
(WINDINGS)
OUTPUT
SHAFT
BEARING
FIGURE 9
 Loading...
Loading...



