Speed control
15
Application examples
15.5
L
15.5-3
EDS82EV903-1.0-11/2002
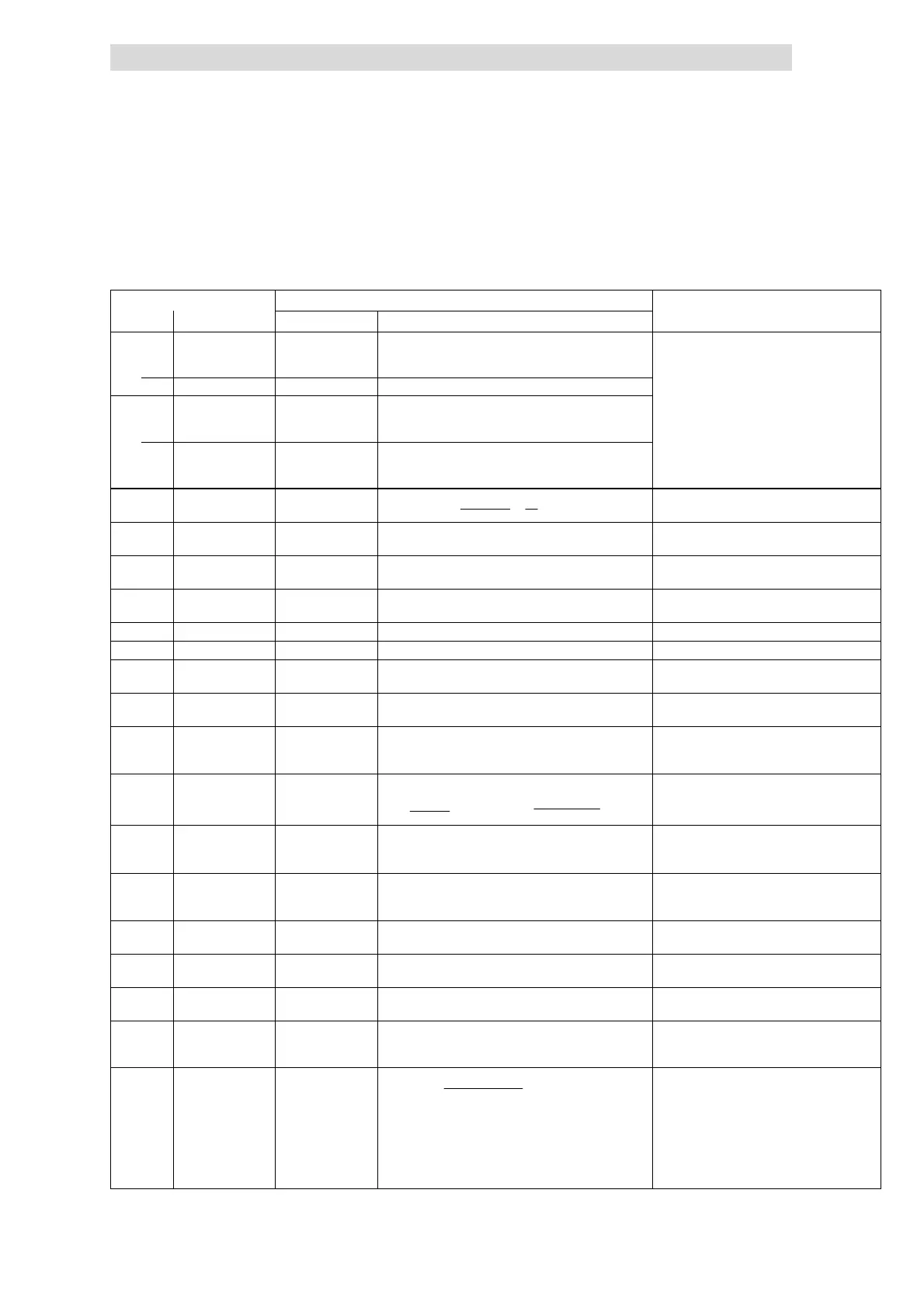
Application-specific configuration
l
Basic settings.
Code Settings IMPORTANT
Value Meaning
C0410 Free configuration
of digital input
signals
Configuration frequency input X3/E1
24 DFIN1-ON 1
C0412 Free configuration
of analog input
signals
Analog signal source
5 Actual process
controller value
(PCTRL1-ACT)
2
C0011 Maximum output
frequency
(1 +
C0074 [%]
100
) ⋅
p
60
⋅ n
max
p = No. of pole pairs
r
max
= Max. speed [min
-1
]
C0014 Operating mode 2 V/f-characteristic control Dynamics in control mode “vector control” to
low
C0019 Operating threshold
of auto DCB
approx. 0.5 Hz Adaptation to the application
C0021 Slip compensation 0% No slip compensa tion with controlled
compensation
C0035 Selection DCB 1 Brake current selection under C0036
C0036 Voltage/current DCB 50 ... 100 % Adaptation to the application
C0070 Process controller
gain
1 ... 15 5=typical
C0071 Process controller
readjust me nt time
50 ... 500 ms 100 ms = typical
C0072 Differential
component of
process controller
0 not active
C0074 Process controller
influence
2 ... 10 %
S
N=
n
0
− n
N
n
0
Example
S
N=
1500 − 1400
1500
= 6.67 %
• Adaptation to the application
• 200% rat ed motor slip (2 * S
r
) adjustment
C0106 Holding time a uto
DCB
1s • Guide value
• Afterwards the controller sets controller
inhibit
C0181 Process controller
setpoint 2
(PCTRL1-SET2)
• Adaptation to the application
• Selection with keypad or PC
C0196 Activation of
auto–DCB
0 DCB a ctive at C0050 < C0019 a nd setpoint < C0019 C0196 = - 1- is not permissible in this
configuration
C0238 Frequency
precontrol
1 With frequency precontrol
C0239 Lowest frequency
limit
0Hz Unipolar, no change of direction of rotation
C0425 Configuration
frequency input
X3/E1 (DFIN1)
Set C0425 that the frequency coming from t he
encoder is lower than f
max
C0426 Gain frequency
input X3/E1, X3/E2
(A) (DFIN1-GAIN)
C0426 =
f
N
⋅ p
z
⋅ (C0011 − f
s)
⋅ 100 %
• f
r
= Normalisation frequency from C0425
• p = Number of pole pairs of the motor
• z = Number of increments per revolution of
the encoder
• C0011 = Maximum output frequency
(corresponds to maximum process speed of
the motor)
• f
s
= Slip frequency