Function library
Positioning control
3.4.13 Program sets (PS)
3−80
l
EDSVS9332P−EXT DE 2.0
3.4.13.4 Touch probe positioning
Purpose
l Positioning depending on an external digital terminal signal (TP positioning).
l E. g.: The front edge of workpieces of different lengths is always to be positioned in the same
position.
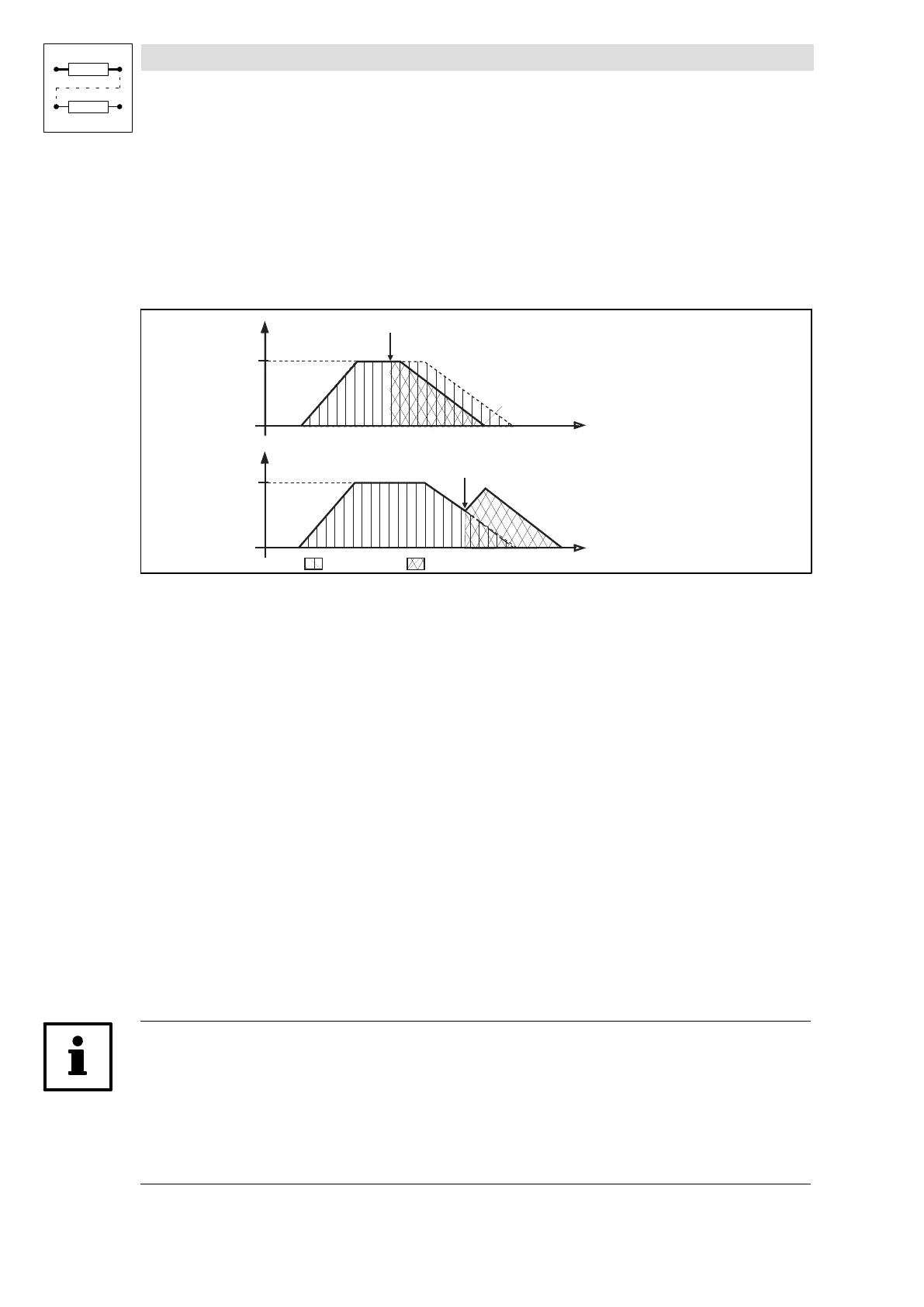
VTVEL: Traversing speed
+ VTACC: Acceleration
− VTACC: Deceleration
C1312: PS target position
C1331: TP residual path
9300POS052
v
v
t
t
Touch-Probe
Touch-Probe
VTVEL
+VTACC
+VTACC
-VTACC
-VTACC
Lage-Ziel
Touch-Probe-Restweg
VTVEL
Fig. 3−31 Speed travel profile of a TP positioning
Function
l PS mode (C1311): Select 6...14 (Absolute PS", Relative PS", TP).
l TP positioning corresponds to a point−to−point positioning with / without velocity changeover.
One of the four possible touch probe inputs (terminals X5/E1 ... X5/E4) is enabled during
positioning.
l If TP occurs, the actual position value is saved as TP position and the target position of the
current positioning is changed.
Calculation of the new target position when TP occurs
TP position + ½TP residual path½
– The value of the TP residual path is always added to the value of the TP position.
– The direction of the TP residual path always corresponds to the traversing direction when TP
occurs.
l The actual position value saving via TP is interrupt−controlled and has a very short response
time:
– rising edge at terminal: <0.010 ms
– falling edge at terminal: <0.100 ms
l The TP input can be enabled for the entire TP positioning process or for parts of it. Target
position, TP residual path and TP window determine the restricted area (fig. 7−37).
Tip!
l The TP position values saved are available in VTPOS−OUT−101 to −104 for further function
block interconnections.
l The function Touch−probe saving of the actual position value" via the function block inputs
POS−TPx−ENABL" is a separate function (see POS−TP). TP positioning has priority over
Touch−probe saving".