Maxim Integrated Page 13 of 15
3.2 Algorithm Mode: Heart Rate and SpO
2
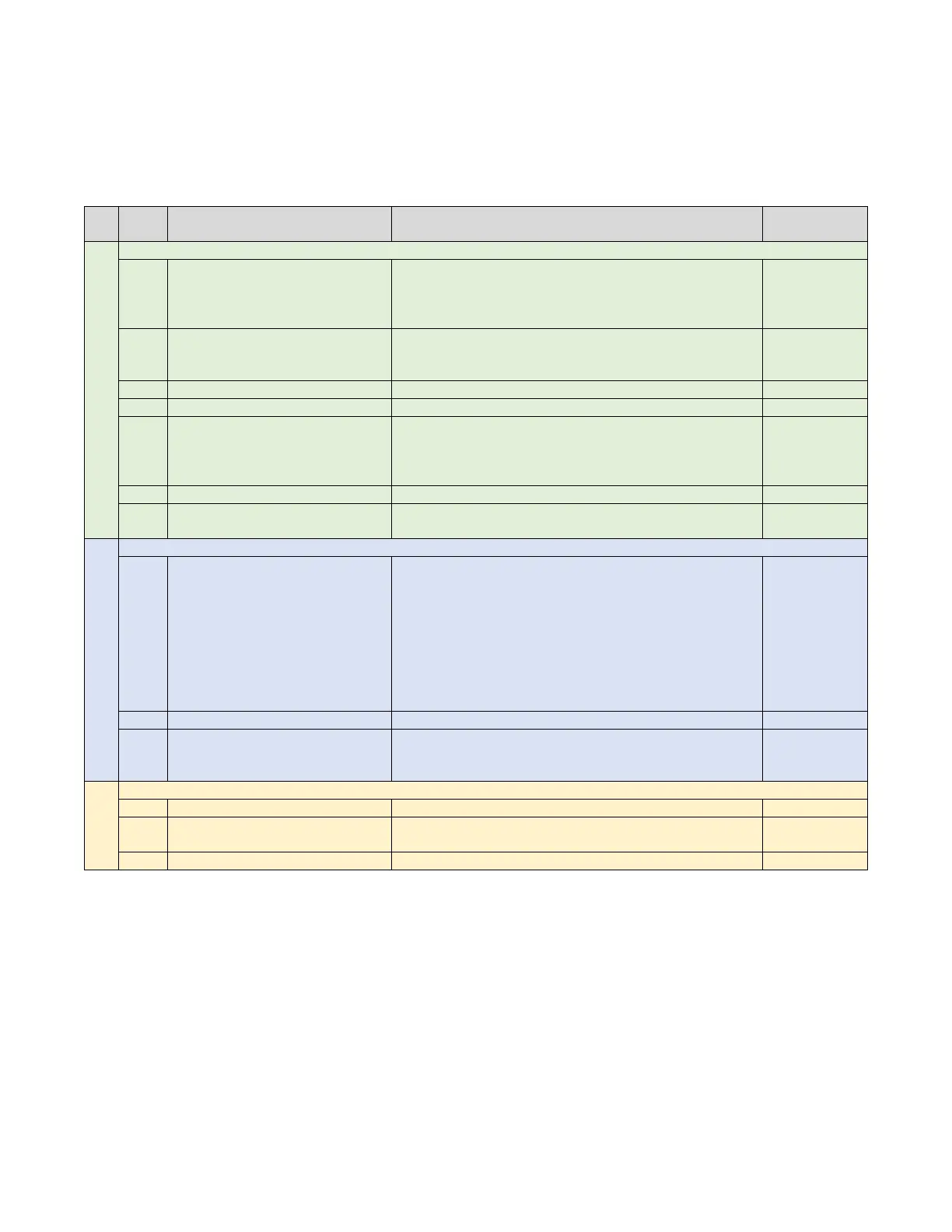
Table 8 shows the list of commands to start the HR/SpO
2
algorithm.
Table 8. Host Commands—HR/SpO
2
Algorithm
#
COMMAND DESCRIPTION
START ALGORITHM
Host initializes the MAX32664A:
00 02 6F 60 (example for A)
FF CB 1D 12 (example for B)
00 AB F3 7B (example for C)
2
calibration coefficients derived from the
procedure in section 2.1. Provided example for:
A = 1.5958422, B = -34.659664, C = 112.68987.
Set output mode to sensor + algorithm data (0x03,
streamed data will include PPG, accelerometer,
Set sensor hub interrupt threshold.
AA 44 04* 01 00 (if sensor
hub accelerator is used)
AA 44 04* 01 01 (if host
Enable the accelerometer with the sensor hub or
host-side accelerometer.*
(Do not use this command if there is no
Enable the AFE (e.g., the MAX30101).
AA 52 02 01 (normal
algorithm report)
2
algorithm. The format of the
samples is shown in Table 9.
Host reads the samples upon receiving the MFIO interrupt by the MAX32664A.
Read the sensor hub status byte:
Bit 0: Sensor comm error
Bits 1 and 2: Reserved
Bit 3: FIFO filled to threshold (DataRdyInt)
Bit 4: Output FIFO overflow (FifoOutOvrInt)
Bit 5: Input FIFO overflow (FifoInOverInt)
Bit 6: Sensor hub busy (DevBusy)
Bit 7: Reserved
If DataRdyInt is set, proceed to next step.
Get the number of samples (nn) in the FIFO.
Read the data stored in the FIFO; nn samples (24
bytes each) will be read. The format of samples is
data_for_
Disable the AFE (e.g., the MAX30101).*
Disable the accelerometer.* (Do not use this
command if there is no accelerometer.)
*Provided indexes are example for sensors such as the MAX30101 AFE or KX122 accelerometer.