19
Chapter 5 Using Instruction
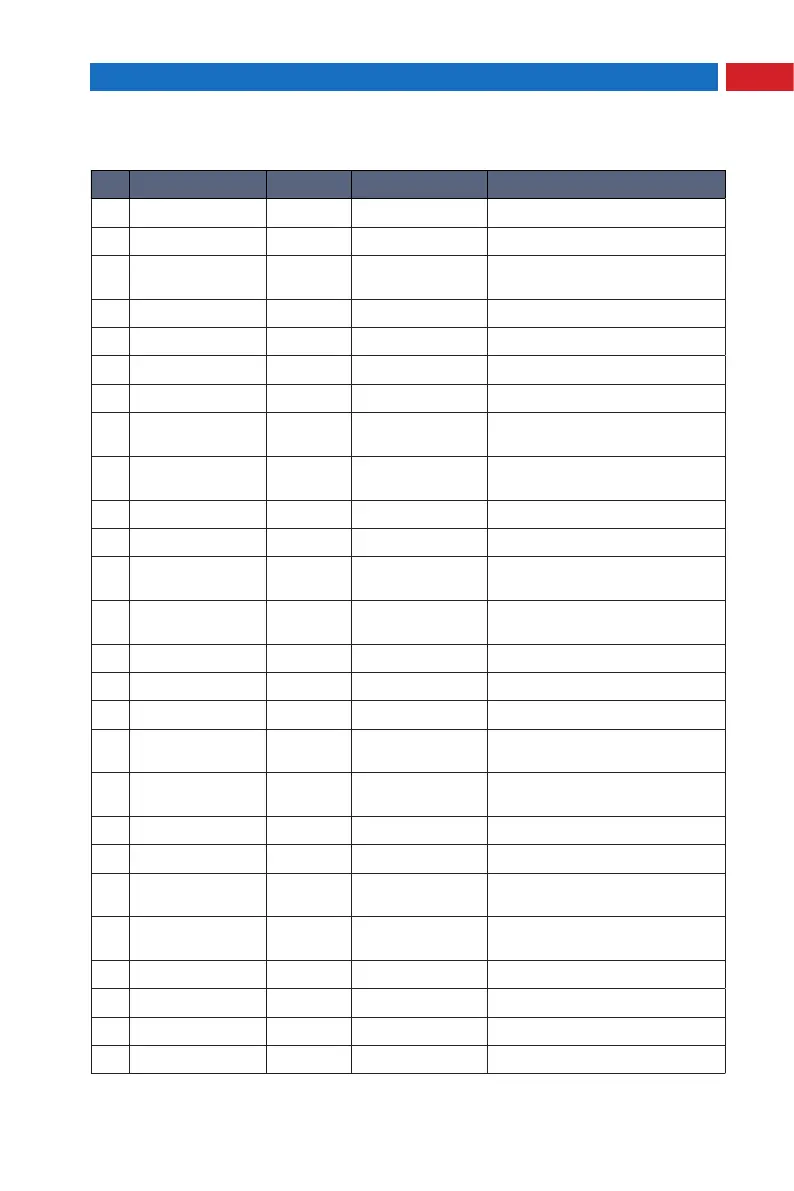
No. Item Direction COM Port Description
1 EN_A_N input Differential Input Optical encoder input A-
2 EN_B_N input Differential Input Optical encoder input B-
3 MARKING_END output OUTIO_COM
Marking end pulse output, high
level available (around 4ms)
4 IO_OUT1 output OUTIO_COM IO port output 1
5
6 OUTIO_COM input IO output COM port
7 EMSTOP input GND Emergency input
8 PULSE_N output
Differential
output
Rotary motor pulse output -
9 DIRECTION_N output
Differential
output
Rotary motor direction output-
10 EN_A_P input Differential Input Optical encoder input A
+
11 EN_B_P input Differential Input Optical encoder input B
+
12
MARKING_
BUSY
output OUTIO_COM
Marking busy Output, high
level available
13 MARKING_ERR output OUTIO_COM
Marking Error Output, high
level available
14 IO_OUT2 output OUTIO_COM IO Port Output 2
15 /
16 GND output Control System Ground
17 PULSE_P output
Differential
output
Rotary motor pulse output+
18 DIRECTION_P output
Differential
output
Rotary motor direction output
+
19 START input GND Foot pedal start
20 STOP input GND Foot pedal Stop
21
PHOTO_
SWITCH+
input Differential Input Photoelectric switch Input
+
22
PHOTO_
SWITCH-
input Differential Input Photoelectric switch Input
-
23 INPUTIO_COM input IO Input COM Port
24 IO_INPUT1 input INPUTIO_COM IO Port Input 1
25 IO_INPUT2 input INPUTIO_COM IO Port Input 2
26 IO_INPUT3 input INPUTIO_COM IO Port Inpu3

 Loading...
Loading...