190
3 BASIC FUNCTION
3.20 Acceleration/deceleration function [G] [A]
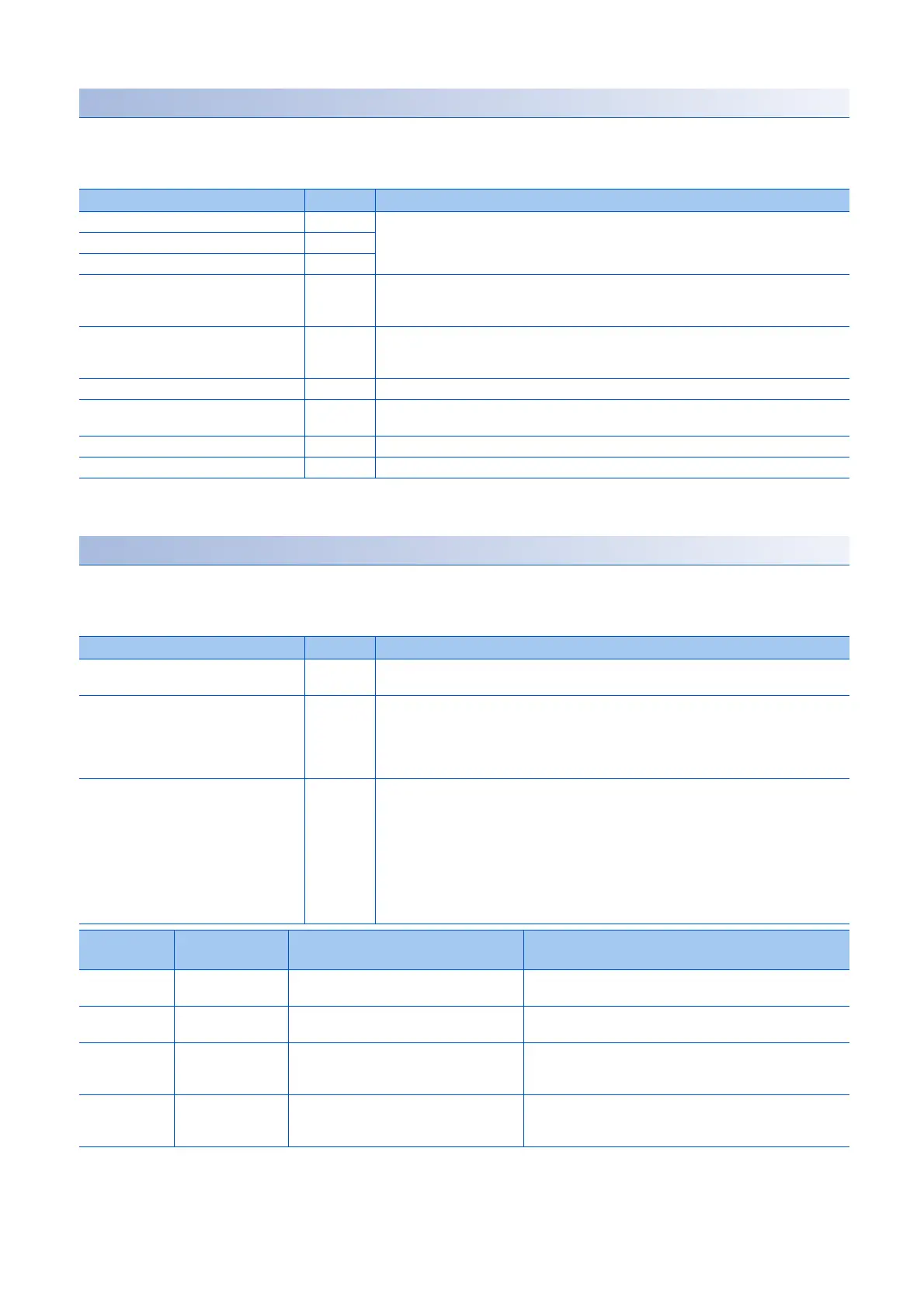
Setting method [G]
The setting method varies for each control mode. Refer to the following table. In addition, the deceleration time constant of the
forced stop deceleration function can be set with [Pr. PC24 Deceleration time constant at forced stop].
Page 171 Forced stop deceleration function
*1 Available on servo amplifiers with firmware version A5 or later.
*2 Available on servo amplifiers with firmware version B8 or later.
Setting method [A]
The setting method varies for each control mode. Refer to the following table. In addition, the deceleration time constant of the
forced stop deceleration function can be set with [Pr. PC51 Deceleration time constant at forced stop].
Page 171 Forced stop deceleration function
Control mode Symbol Description
Cyclic synchronous position mode csp Determined by the commands from the controller.
Set according to the manual of the controller to be used.
Cyclic synchronous velocity mode csv
Cyclic synchronous torque mode cst
Profile position mode
*1
pp Can be set with [Profile acceleration (Obj. 6083h)] and [Profile deceleration (Obj. 6084h)].
Can also be set with [Pr. PT49 Speed acceleration time constant] and [Pr. PT50 Speed
deceleration time constant].
Profile velocity mode
*1
pv Can be set with [Profile acceleration (Obj. 6083h)] and [Profile deceleration (Obj. 6084h)].
Can also be set with [Pr. PT49 Speed acceleration time constant] and [Pr. PT50 Speed
deceleration time constant].
Profile torque mode
*1
tq The amount of torque change can be set with [Torque slope (Obj. 6087h)].
Homing mode hm This mode can be set with [Homing acceleration (Obj. 609Ah)].
Page 54 Homing mode (hm)
Point table mode
*2
pt Page 570 How to Set Point Table
JOG operation mode
*2
jg Page 566 JOG operation mode (jg)
Control mode Symbol Setting method
Position control mode P Determined by the command pulse frequency from the controller.
Set according to the manual of the controller to be used.
Speed control mode S This mode can be set with [Pr. PC01 Speed acceleration time constant] and [Pr. PC02 Speed
deceleration time constant]. By turning on the STAB2 (Speed acceleration/deceleration
selection), the speed control mode will be changed to the value set in [Pr. PC30 Speed
acceleration time constant 2] and [Pr. PC31 Speed deceleration time constant 2].
Page 96 Speed control mode (S)
Torque control mode T This mode can be set with [Pr. PC01 Speed acceleration time constant] and [Pr. PC02 Speed
deceleration time constant].
By turning on the STAB2 (Speed acceleration/deceleration selection), the speed control mode
will be changed to the value set in [Pr. PC30 Speed acceleration time constant 2] and [Pr. PC31
Speed deceleration time constant 2].
Page 98 Torque control mode (T)
For the torque limit and the speed limit, refer to the following.
Page 344 Torque limit [A]
Page 349 Speed limit [A]
Servo
parameter
Symbol Name Outline
PC01 STA Speed acceleration time constant Set the speed acceleration time constant.
Initial value: 0 [ms]
PC02 STB Speed deceleration time constant Set the speed deceleration time constant.
Initial value: 0 [ms]
PC30 STA2 Speed acceleration time constant 2 Set the speed acceleration time constant for when STAB2 (Speed
acceleration/deceleration selection) is turned on.
Initial value: 0 [ms]
PC31 STB2 Speed deceleration time constant 2 Set the speed deceleration time constant for when STAB2 (Speed
acceleration/deceleration selection) is turned on.
Initial value: 0 [ms]

 Loading...
Loading...









