MIX-A-SVJ
Parameter Descriptions
,:
-..:ii:-.
.
.
.
.
.
.
.
lame
Em-
V018
vo19
vo20
VO21
YO22
-_-
NO23
wo24
WO25
.
-
bl-•vi
tion
-
PEC
Setting
:ervo
configuration
Description
range
Mini- Maxi-
mum mum
15 14
13 12
11 10
9
8 7 6 5
4 3
2
10
I
I
I
I
I
I
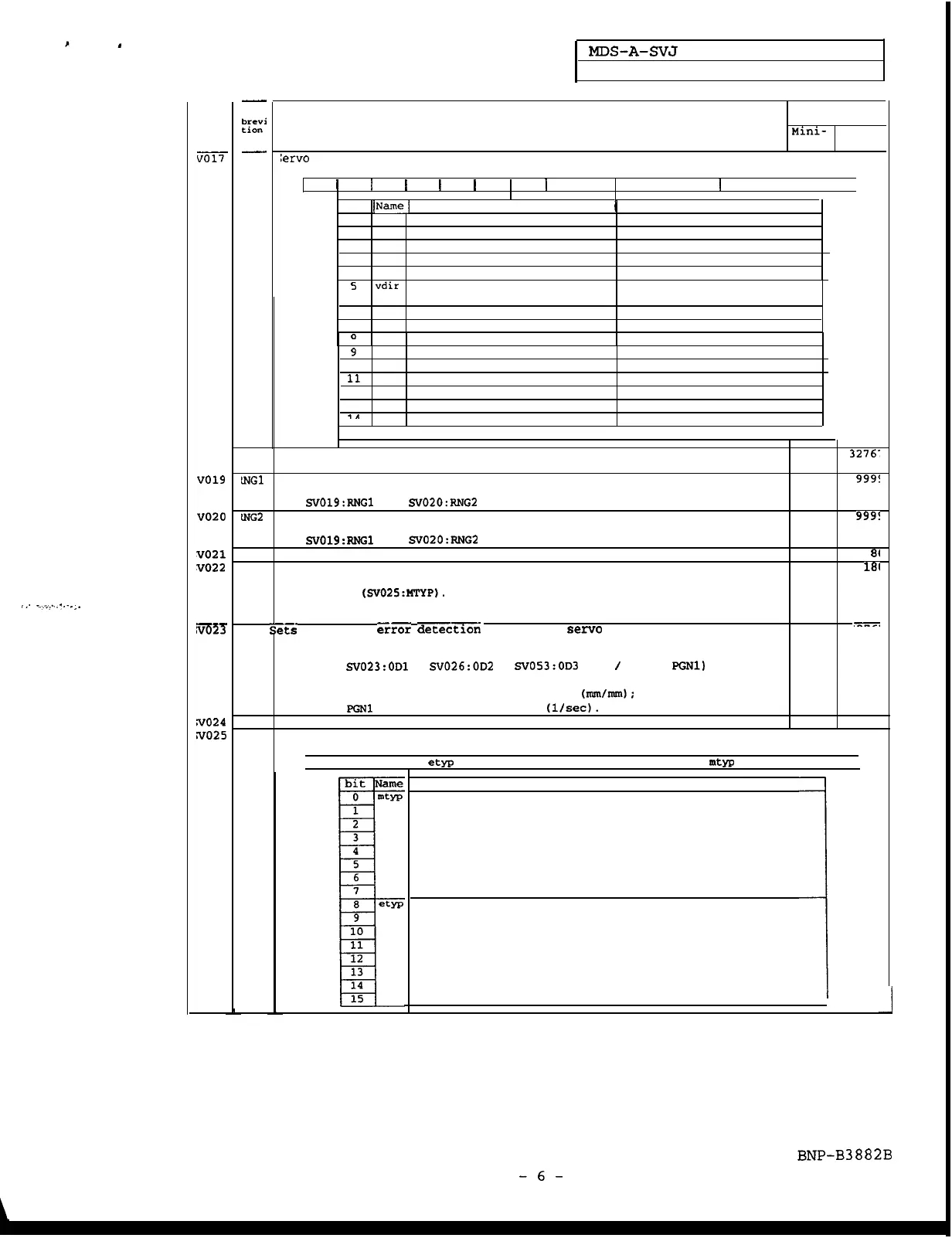
abs
vdir
I
I
I
I
I
bit
(Name!
Function when set to zero
I
Function when set to 1
4
5
vdir
Detector mounting direction
Detector mounting direction
AC
BD
6
7
abs
Relative position detection
Absolute position detection
Q
9
10
11
12
13
-1
PIT
Sets ball screw lead. Normally set to 360 for rotating axis.
1
3276-
Setting is made in mm, so not compatible with imperial ball screws.
LNGl
Sets number of pulses per one revolution of motor-end detector in units
1
999!
of 1,000 pulses.
Set
SVO19:BNGl
and
SVO2O:PNGZ
to same value
!NG2
Sets number of pulses per one revolution of motor-end detector in units
1
999!
of 1,000 pulses.
Set
SVO19:PNGl
and
SVO2O:BNGZ
to same value
OLT Sets overload detection time constant.
1
81
OLL Sets overload current detection level as a % of rated current.
32
18(
Determines the amp load. The motor load is determined by the motor/de-
tector type
(SVO~S:MTYP).
.The servo monitor load is displayed on the
basis that the amp load or motor load, whichever is greater, is the
rated continuous output level (alarm level), i.e., 100%.
001
Sets
excessive
error
detec-
range when
sewo
is ON. With a setting
0
7
3276
of zero,
excessive error detection does not take place.
Standard setting formula:
SV023:ODl
=
SV026:002
=
SV053:003
= F
/
(60 X
PGNl)
X 0.5,
where
F = Maximum rapid traverse speed
(mm/mm):
PGNl
= Position loop gain 1
(l/set).
INP
Sets in-position detection range.
4TYP Motor/detector type
0
3276
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
I
em
I
mtYP
1
Description
Sets motor type (see Motor Types table).
Sets detector type (see Detector Types table).
-!
-6-
BNP-B3882B
 Loading...
Loading...

