4 Chapter 1. Introduction
Gain (dB)
20
0
40
60
–20
10
2
10
1
10
3
10
4
10
5
10
6
10
7
Fourier frequency [Hz]
Integrator
Double integrator
Proportional
High freq. cuto
Dierentiator
Integrator
10
8
FAST LF GAIN (limit)
FAST
GAIN
DIFF GAIN (limit)
FAST INT
FAST DIFF
SLOW INT
Filter
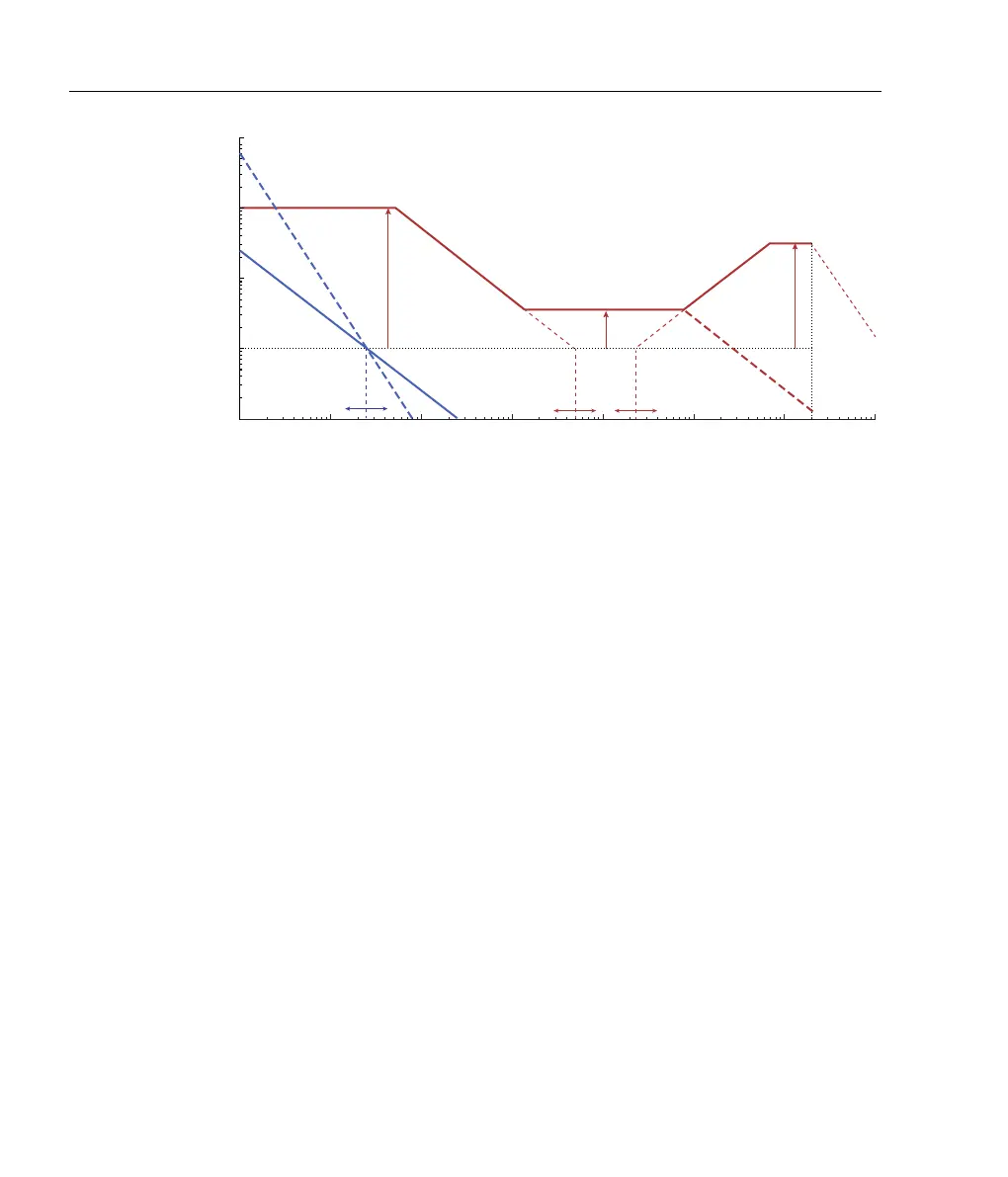
Figure 1.3: Conceptual Bode plot showing action of the fast (red) and
slow (blue) controllers. The slow controller is either a single or double
integrator with adjustable corner frequency. The fast controller is PID
with adjustable corner frequencies and gain limits at the low and high
frequencies. Optionally the differentiator can be disabled and replaced
with a low-pass filter.
Alternatively, applications that do not require a differentiator may
benefit from low-pass filtering of the fast servo response to further
reduce the influence of noise. This can be achieved by switching on
the “filter” mode, which causes the servo response to roll-off at the
specified frequency.