7.3.5) ROBUS w trybie „Slave”
Odpowiednio zaprogramowany i podłączony ROBUS może działać
wtrybie„Slave”,tentrybdziałaniawykorzystywanyjestwprzypadku
potrzeby zautomatyzowania dwóch przeciwległych skrzydeł, gdy
zamiarem jest uzyskanie zsynchronizowanych ruchów obu skrzydeł
bramy. W tym trybie jeden ROBUS działa jako Master, to znaczy
steruje manewrem, natomiast drugi ROBUS pracuje w trybie Slave,
to znaczy wykonuje polecenia wysyłane przez Master (fabrycznie
wszystkieROBUSzaprogramowanesąjakoMaster).
WceluskonfigurowaniaROBUSjakoSlavenależyuruchomićfunkcję
pierwszego poziomu „Tryb Slave” (patrz tabela 5).
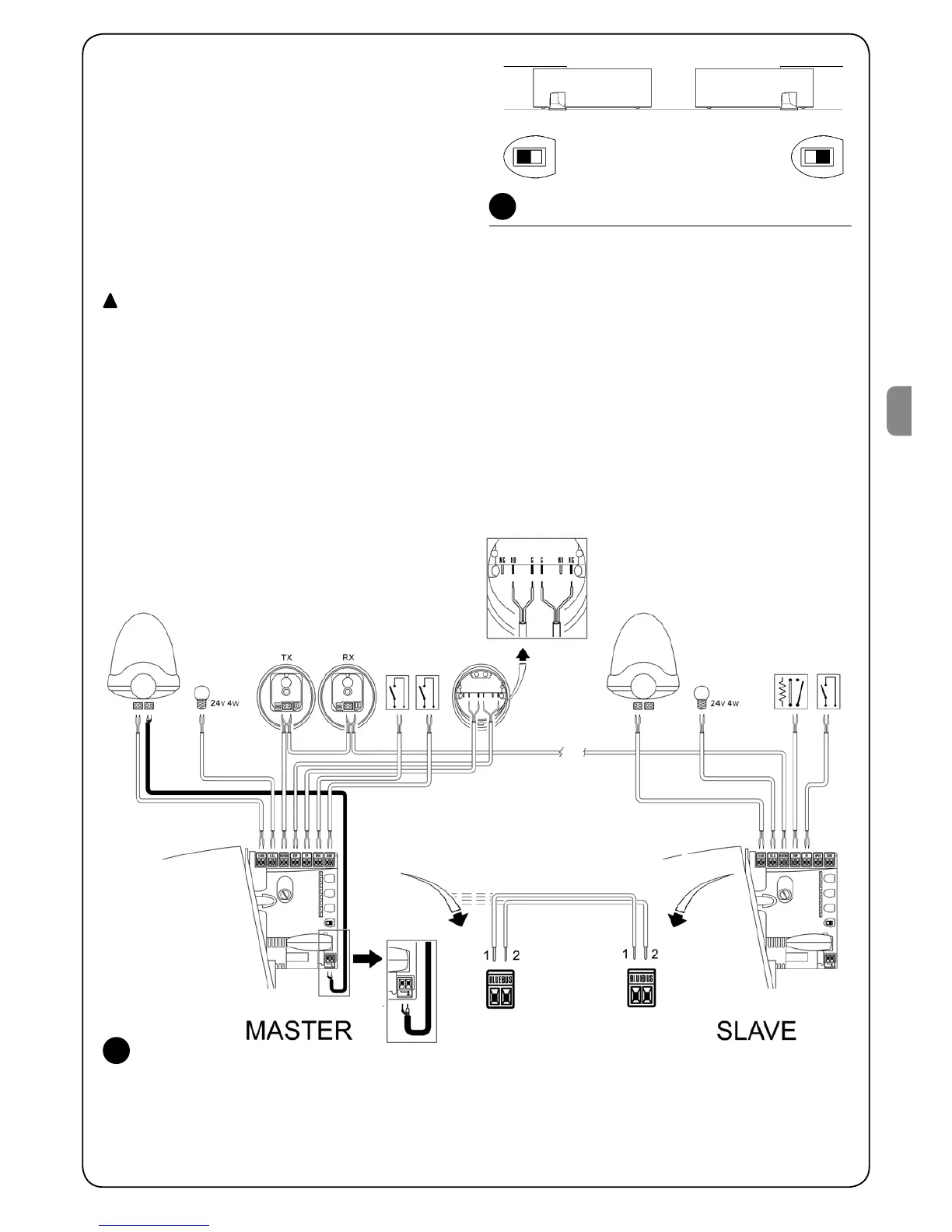
PołączeniepomiędzyROBUSMasteraROBUSSlaveodbywasięza
pośrednictwemBLUEBUS.
W tym przypadku należy zachować biegunowość
połączeń między obydwoma ROBUS, jak to zilustrowano na
rysunku 26 (pozostałe urządzenia nie muszą mieć zachowa-
nej biegunowości).
WceluzainstalowaniadwóchROBUSwtrybieMasteriSlavenależy
wykonaćnastępująceczynności:
• Wykonać połączenie obu silników w sposób zilustrowany na
rysunku25.Jestobojętne,któryzsilnikówfunkcjonowałbędziejako
Master,aktóry jako Slave,wybierającnależyuwzględnić wygodę
połączeńorazfakt,żepolecenieKrokpokrokuwSlavezezwalana
całkowiteotwarciejedynieskrzydłanapędzanegoSlave.
•Połączyćdwasilnikijaknarysunku26.
•Wybraćkierunekmanewruotwarciaobydwusilników,jaktowska-
zanonarysunku25(patrztakżeparagraf„4.1Wybórkierunku”).
•Podłączyćzasilanieobusilników.
•WROBUSSlavezaprogramowaćfunkcję„TrybSlave”(patrztabe-
la 5).
•Wykonaćrozpoznanie urządzeńpodłączonychdoROBUSSlave
(patrzparagraf„4.3Rozpoznawaniedołączonychurządzeń”).
•WykonaćrozpoznanieurządzeńpodłączonychdoROBUSMaster
(patrzparagraf„4.3Rozpoznawaniedołączonychurządzeń”).
•DokonaćpomiarudługościskrzydełbramyprzezROBUSMaster
(patrzparagraf“4.4Rozpoznaniedługościskrzydła”).
25
26
WpołączeniuobuROBUSwtrybieMaster-Slavezwrócićuwagęaby:
•WszystkieurządzeniabyłypodłączonedoROBUSMaster(jaknarysunku26),wtymtakżeodbiornikradiowy.
•Wprzypadkuzastosowaniabateriibuforowej,obasilnikimusządysponowaćwłasnąbaterią.
•WszystkieprogramyzROBUSSlavebyłyignorowane(przeważajątezROBUSMaster),zawyjątkiemtych,którewskazanowtabeli12.
LUCYB
S.C.A.
MOFB
MOSE
OPEN
CLOSE
LUCYB
S.C.A.
STOP
PP

 Loading...
Loading...