J03
J03
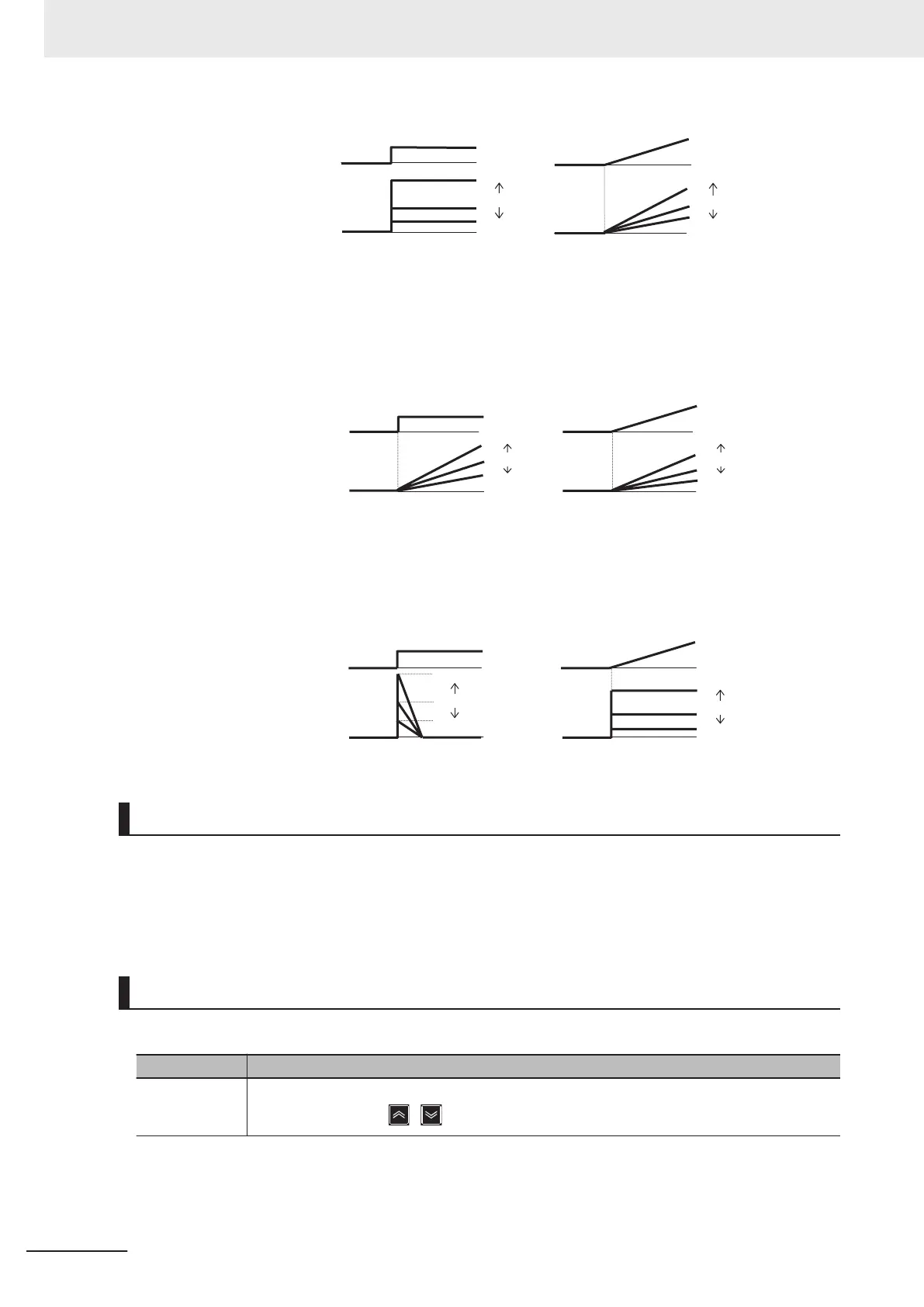
Target value
Control value
Step transition Ramp transition
Large
Small
Large
Small
2. PID Control I Integral Time (J04)
In this operation, the operation amount is proportional to the time integral value of the deviation.
The P operation is less effective as the current value approaches the target value due to smaller
deviation, taking a long time to reach the target value. The I operation compensates this disadvant-
age.
J04 J04
Target value
Control value
Step transition Ramp transition
Large
Small
Large
Small
3. PID Control D Differential Time (J05)
In this operation, the operation amount is proportional to the percentage of change in the deviation.
Because using only the PI operation is time-consuming, the D operation is used to effectively com-
pensate for the disadvantage in responsiveness.
J05
J05
Target value
Control value
Step transition Ramp transition
Large
Small
Large
Small
PID Normal Operation/Reverse Operation
Since normal operation or reverse operation can be selected for the output of PID process control, the
fluctuations in the motor rotation speed with respect to the deviation (difference between the command
value and feedback value) can be set. Switching of normal operation and reverse operation by an ex-
ternal signal (21:IVS (Switch normal/inverse operation)) is also possible.
PID command
This command is used to select the means for setting the command values of PID control.
J02 Function
0
PID command by Operator
PID command by the / keys on Operator
7 Other Functions
7-128
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...

