17
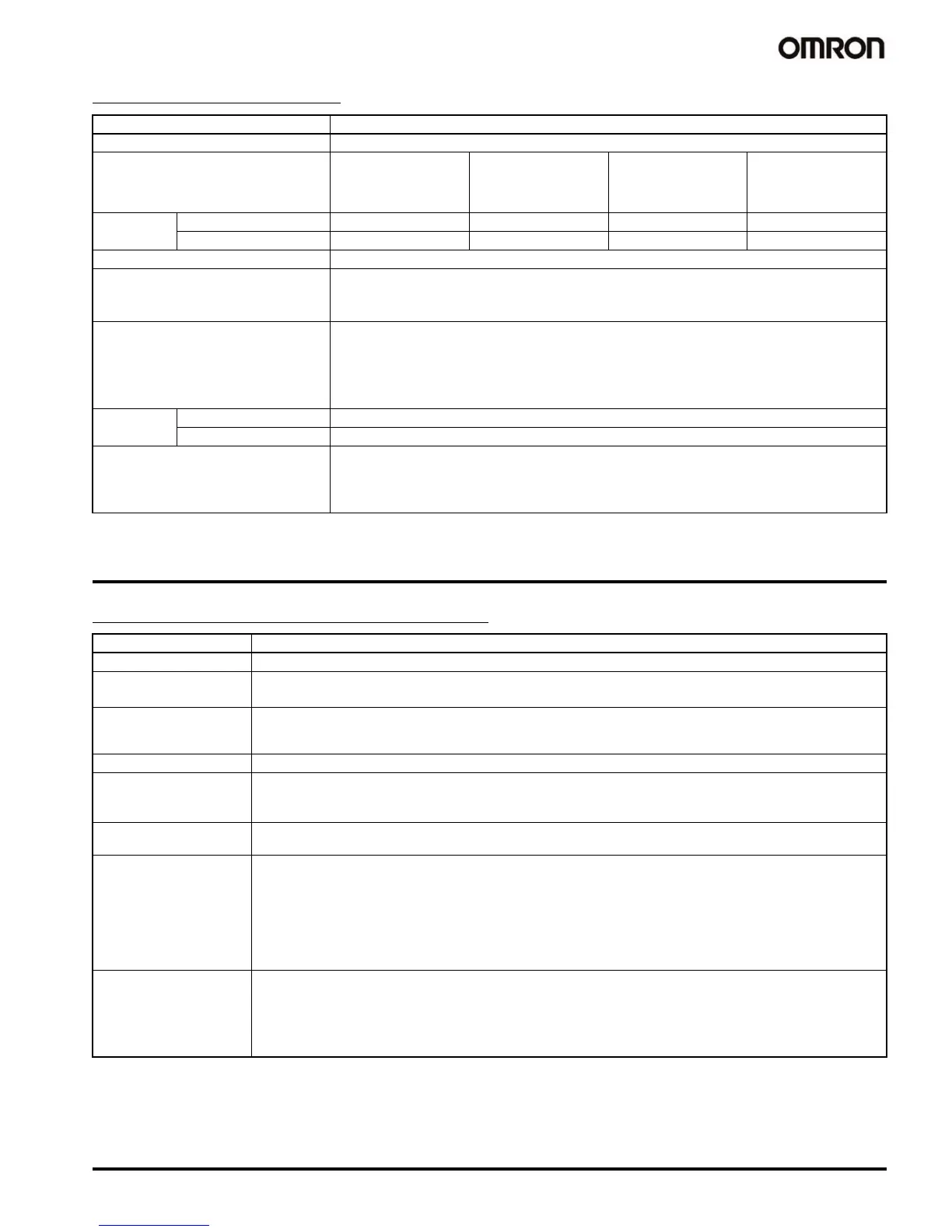
High-speed Counter Input
Built-in Output Specifications
Positioning and Speed Control Functions
Item Specification
Number of high-speed counter inputs 2 (high-speed counters 0 and 1)
Counter modes (set in the PC Setup) Phase differential inputs
(phase-A, -B, and -Z in-
puts)
Up and down pulse in-
puts (incremental pulse,
decremental pulse, and
reset inputs)
Pulse + direction inputs
(pulse, direction, and re-
set inputs)
Incremental pulse input
(incremental pulse and
reset inputs)
Response
frequency
Line driver input 50 kHz 100 kHz 100 kHz 100 kHz
24-VDC input 30 kHz 60 kHz 60 kHz 60 kHz
Counter type Linear counter or circular counter (set in the PC Setup)
Counting range Linear counter: 8000 0000 to 7FFF FFFF Hex
Circular counter: 0000 0000 to circular counter set value
(The circular counter set value is set in the PC Setup in the range 0000 0001 to FFFF FFFF Hex.)
High-speed counter present value stor-
age words
High-speed counter 0: A270 (lower digits) and A271 (upper digits)
High-speed counter 1: A272 (lower digits) and A273 (upper digits)
Target value comparison inputs and range comparison inputs are possible for these values.
Note: The present values are updated each cycle as part of common processing. Use the PRV in-
struction to read the latest value.
Control
method
Target value comparison Up to 48 target values and interrupt task numbers can be registered.
Range comparison Up to 8 upper limits, lower limits, and interrupt task numbers can be registered.
Counter reset method Z-phase signal + software reset: Counter reset when the Z-phase input is turned ON with the reset bit
(see below) ON.
Software reset: Counter reset when the reset bit (see below) turns ON.
Reset bit: A531, bit 00 (high-speed counter 0); A531, bit 01 (high-speed counter 1)
Item Specification
Output frequency 1 Hz to 100 kHz (1 to 100 Hz: 1-Hz units; 100 Hz to 4 kHz: 10-Hz units; 4 to 100 kHz: 100-Hz units)
Frequency acceleration/
deceleration rate
1 Hz to 2 kHz (every 4 ms), set in 1-Hz units
Acceleration and deceleration for the PLS2 instruction can be set individually.
Changing set values
during instruction
execution
The target frequency, acceleration/deceleration rate, and target position can be changed. The target frequency and
acceleration/deceleration rate can only be changed for positioning at a constant speed.
Pulse output method CW/CCW or pulse + direction
Number of output pulses Relative coordinate specifications: 0000 0000 to 7FFF FFFF Hex (2,147,483,647 in either incremental or decremen-
tal direction)
Absolute coordinate specifications: 8000 0000 to 7FFF FFFF Hex (
−2,147,483,648 to 2,147,483,647)
Instruction for origin
search/reset
ORG (ORIGIN SEARCH): Used to perform origin searches or origin resets according to set parameters.
Instructions for
positioning and speed
control
PLS2 (PULSE OUTPUT): Used to output pulses for trapezoidal positioning with individually set acceleration and de-
celeration rates.
PULS (SET PULSES): Used to set the number of output pulses.
SPED (SPEED OUTPUT): Used to output pulses without acceleration or deceleration. (The number of pulses must
be set beforehand using the PULS instruction to perform positioning.)
ACC (ACCELERATION CONTROL): Used to control the acceleration/deceleration rate.
INI (MODE CONTROL): Used to stop pulse output.
Pulse output present
value storage area
AR Area Words
Pulse output 0: A276 (lower 4 digits) and A277 (upper 4 digits)
Pulse output 1: A278 (lower 4 digits) and A279 (upper 4 digits)
The present values are updated each cycle as part of overhead processing.
The pulse output present value can be read to specified words using PRV (HIGH-SPEED COUNTER PV READ).