3-51
3 Error Tables
NJ-series Troubleshooting Manual (W503)
3-1 Errors by Source
3
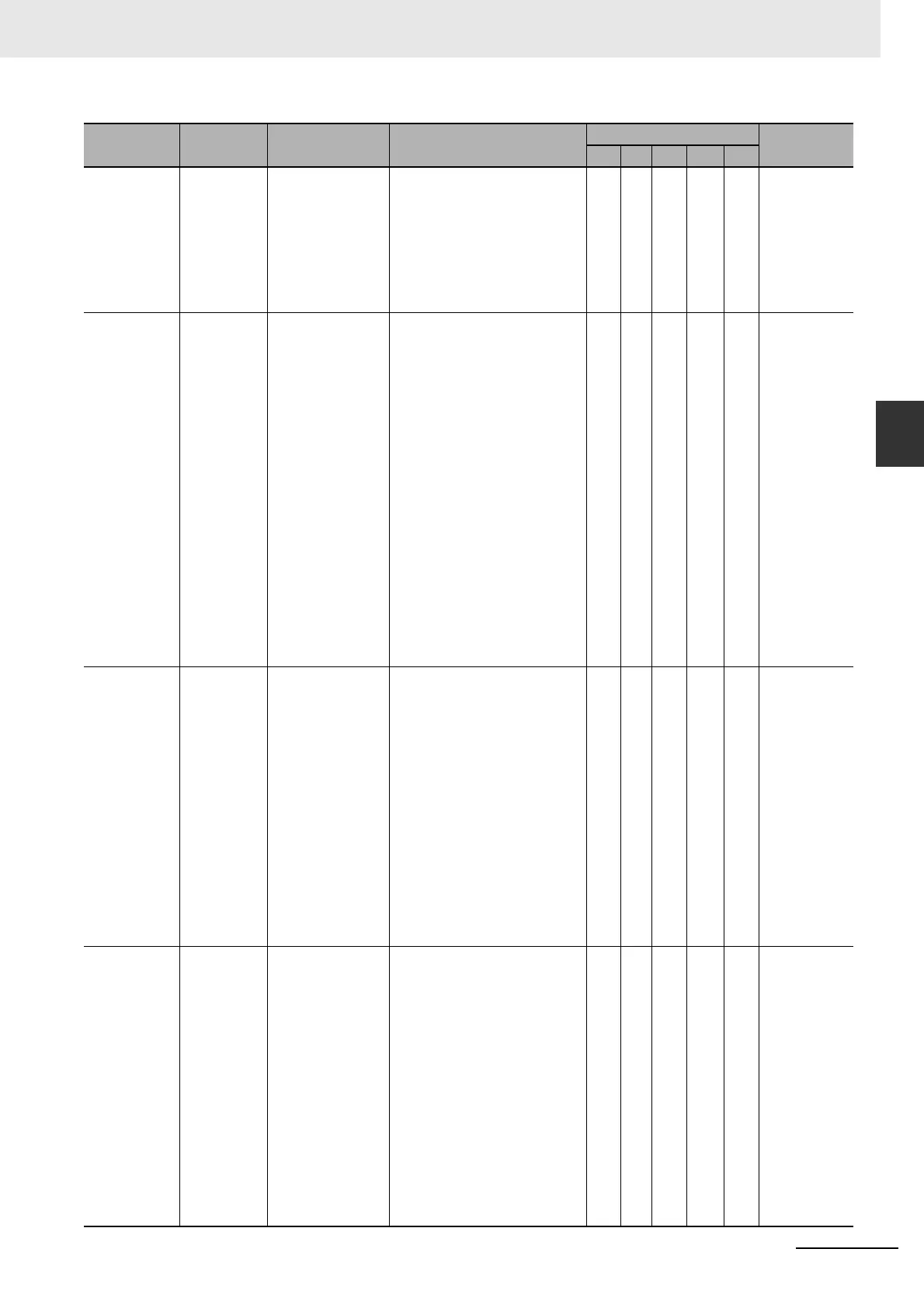
3-1-3 Errors in the Motion Control Function Module
74380000 hex Feed Dis-
tance Over-
flow
The target position
after the interrupt
input was received
for the
MC_MoveFeed
(Interrupt Feeding)
instruction over-
flowed or under-
flowed.
• The target position after the
interrupt input was received for
the MC_MoveFeed (Interrupt
Feeding) instruction exceeded
the range of signed 40-bit data
when converted to pulses.
S NJ-series
CPU Unit
Motion Con-
trol User’s
Manual (Cat.
No. W507)
74390000 hex Error in
Changing
Servo Drive
Control Mode
Changing the Con-
trol Mode was not
completed within
the specified time.
• When the
MC_SyncMoveVelocity instruc-
tion was stopped, the actual
current velocity was not
reduced to 10% or less of the
maximum velocity within 10
seconds for three consecutive
periods after a command veloc-
ity of 0 was output.
• For an OMRON G5-series
Servo Drive, the actual current
velocity was not reduced to
10% or less of the maximum
velocity within 10 seconds for
three consecutive periods when
the MC_TorqueControl instruc-
tion was stopped.
• Changing the Control Mode of
the Servo Drive between CSP,
CSV, and CST was not com-
pleted within one second after
the command was executed.
S Same as
above.
743A0000 hex Master Axis
Position
Read Error
The synchronized
instruction was not
executed because
an error occurred in
the position of the
master axis of the
synchronized
instruction.
• EtherCAT process data com-
munications are not established
for the master axis of the syn-
chronized instruction or the I/O
data of the NX Unit cannot be
used for control.
• The slave of the master axis for
the synchronized instruction
was disconnected or disabled.
• An Absolute Encoder Current
Position Calculation Failed error
(6458000 hex) was detected for
the master axis of a synchro-
nized instruction.
• The master axis for the syn-
chronized instruction is an
unused axis.
S Same as
above.
743B0000 hex Auxiliary Axis
Position
Read Error
The synchronized
instruction was not
executed because
an error occurred in
the position of the
auxiliary axis of the
synchronized
instruction.
• EtherCAT process data com-
munications are not established
for the auxiliary axis of the syn-
chronized instruction or the I/O
data of the NX Unit cannot be
used for control.
• The slave of the auxiliary axis
for the synchronized instruction
was disconnected or disabled.
• An Absolute Encoder Current
Position Calculation Failed error
(6458000 hex) was detected for
the auxiliary axis of a synchro-
nized instruction.
• The auxiliary axis for the syn-
chronized instruction is an
un
used axis.
S Same a
s
above.
Event code Event name Meaning Assumed cause
Level
Reference
Maj Prt Min Obs Info

 Loading...
Loading...












