3-113
3 Error Tables
NJ-series Troubleshooting Manual (W503)
3-1 Errors by Source
3
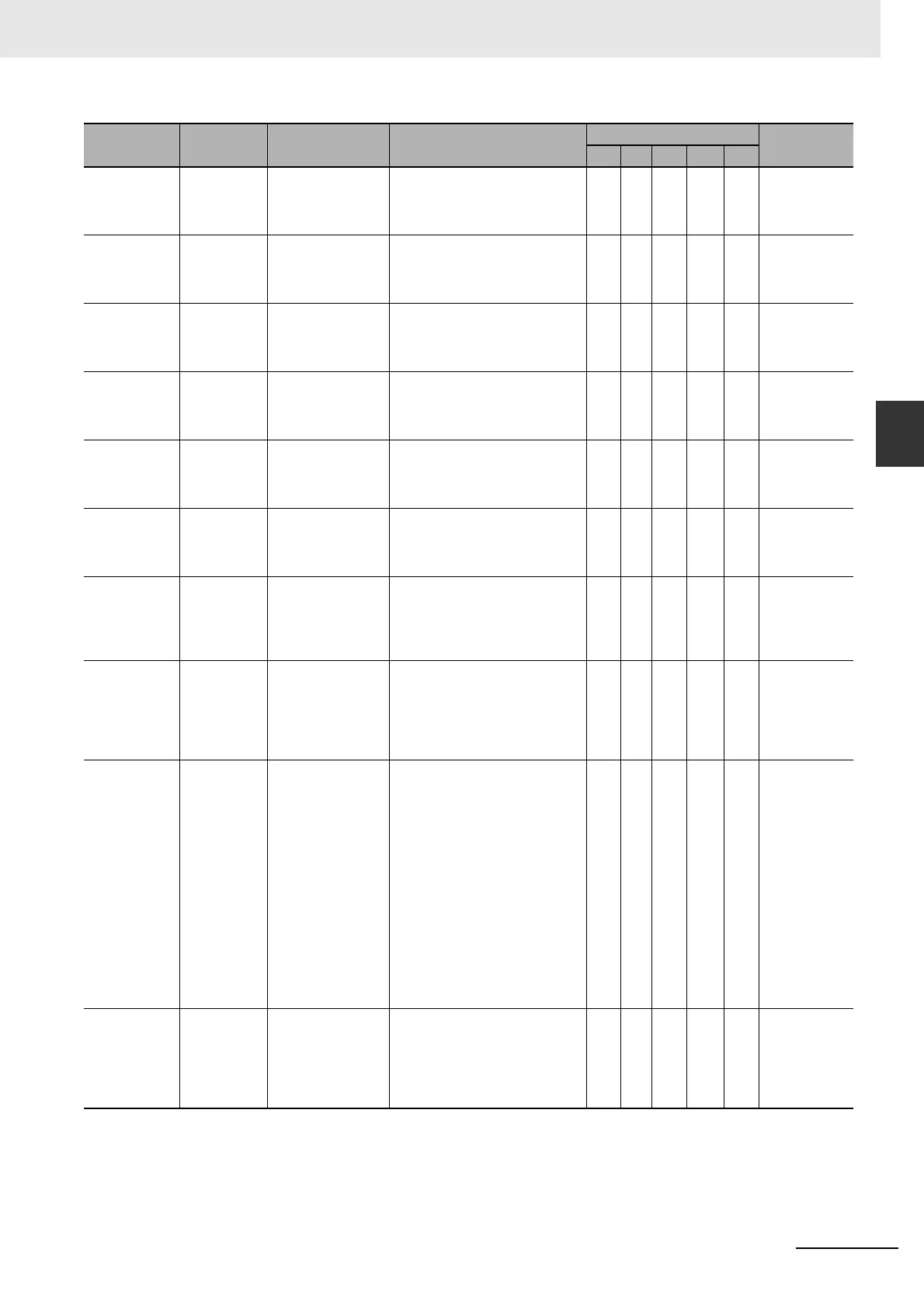
3-1-8 Errors in EtherCAT Slaves
18230000 hex Absolute
Encoder
Multi-rotation
Counter Error
The encoder
detected a multi-
rotation counter
error.
• Servomotor failed. S Cylinder-type
Motor Manual
(Cat. No. I576)
24680000 hex Motor Non-
conformity
The Servo Drive
and Servomotor
combination is not
correct.
• The Servo Drive and Servomo-
tor combination is not correct.
S Same as
above.
24690000 hex Motor Non-
conformity
The Servo Drive
and Servomotor
combination is not
correct.
• The Servo Drive and Servomo-
tor combination is not correct.
S Same as
above.
246A0000 hex Motor Non-
conformity
The Servo Drive
and Servomotor
combination is not
correct.
• The Servo Drive and Servomo-
tor combination is not correct.
S Same as
above.
246B0000 hex Motor Non-
conformity
The Servo Drive
and Servomotor
combination is not
correct.
• The Servo Drive and Servomo-
tor combination is not correct.
S Same as
above.
246C0000 hex Motor Non-
conformity
The Servo Drive
and Servomotor
combination is not
correct.
• The Servo Drive and Servomo-
tor combination is not correct.
S Same as
above.
28010000 hex Motor Set-
ting Error
Settings associ-
ated with the motor
and external
encoder are miss-
ing.
• Settings associated with the
motor and external encoder are
missing.
S Linear Motor
Manual (Cat.
No. I577)
28020000 hex Motor Combi-
nation Error 1
The value set for
the motor current
exceeds the maxi-
mum motor capac-
ity allowed for the
Servo Drive.
• The Motor Rated Rms Cur-
rent/Motor Peak Absolute Cur-
rent exceeds the maximum
motor capacity allowed for the
Servo Drive.
S Same as
above.
28030000 hex Motor Combi-
nation Error 2
The value set for
the motor exceeds
the drive range of
the motor.
• The Motor Rated Rms Current
is too low compared with the
maximum motor capacity of the
Servo Drive.
• The percentage of the Motor
Coil Unit Mass to the Motor
Rated Force is too high.
• Th
e automatically adjusted Cur-
rent Loop Prop
ortional
Gain/Current Loop Integral
Gain is too high.
• The percentage of the Motor
Peak Absolute Current to the
Motor Rated Rms Current is
greater than 500%.
S Same as
above.
34E10000 hex Servo Drive
Overheat
The temperature of
the Servo Drive
radiator or power
elements exceeded
the specified value.
• The ambient temperature of the
Servo Drive exceeded the
specified value.
• Overload
S Cylinder-type
Motor Manual
(Cat. No. I576)
and Linear
Motor Manual
(Cat. No. I577)
Event code Event name Meaning Assumed cause
Level
Reference
Maj Prt Min Obs Info

 Loading...
Loading...












