Appendices
A - 100
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
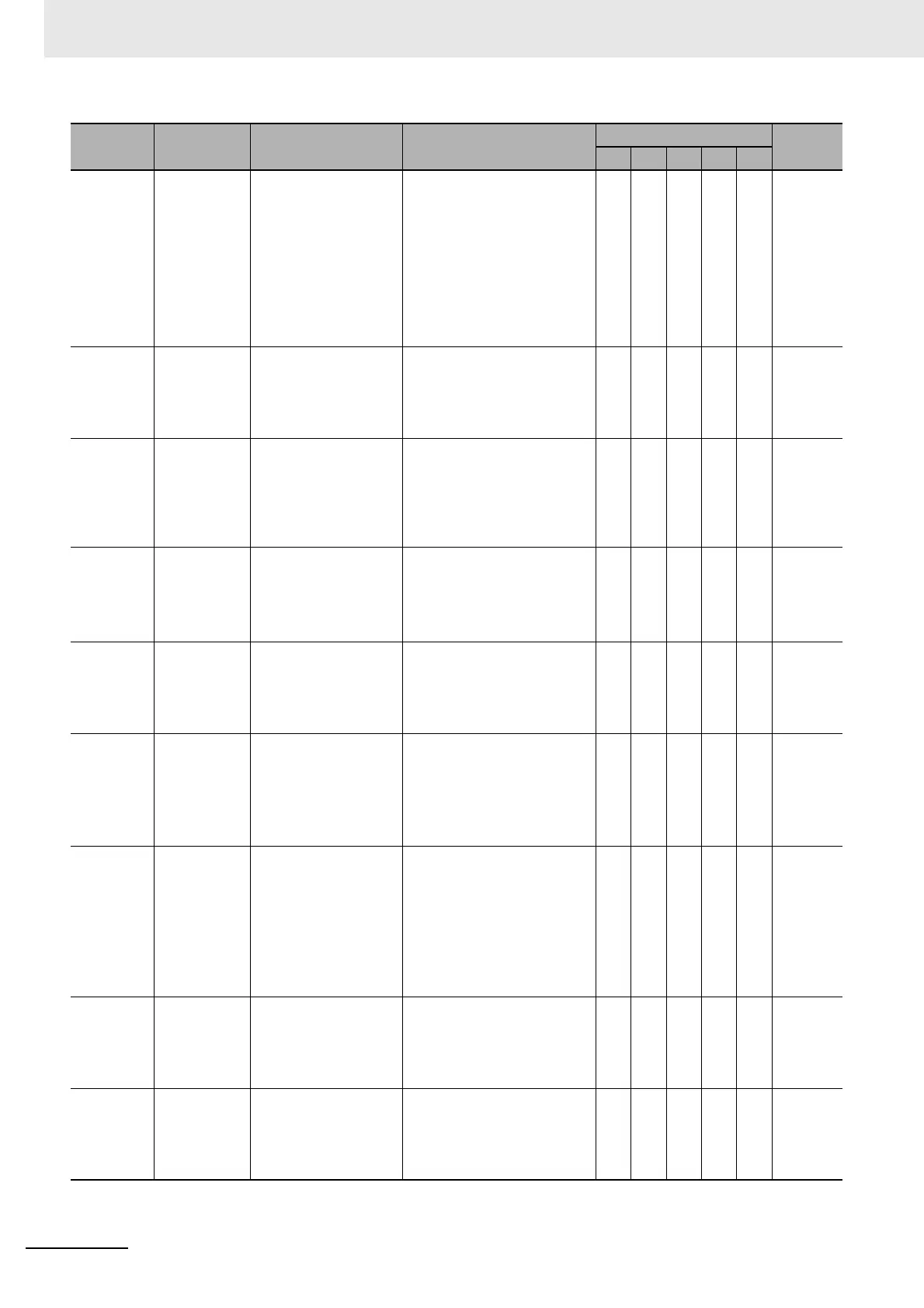
34E5 0000
hex
Excessive
Speed
Deviation
Error
The difference
between the internal
position command
velocity and the actual
velocity (i.e., the
velocity error)
exceeded the
Excessive Velocity
Error Setting
(3602 hex).
• Motor operation does not
follow the command.
• The setting of the
Excessive Velocity Error
Setting (3602 hex) is too
small.
3 P.A-133
34E6 0000
hex
Overspeed The motor speed
exceeded the value
set on the Overspeed
Detection Level
Setting (3513 hex).
• The velocity command
value is too large.
• There is overshooting.
• The wiring is incorrect.
3 P.A-134
3840 0000
hex
Overspeed 2 The motor speed
exceeded the value
set on Overspeed
Detection Level
Setting at Immediate
Stop (3615 hex).
• The velocity command
value is too large.
• There is overshooting.
• The wiring is incorrect.
3 P.A-135
3841 0000
hex
Command
Error
The position
command variation
after the electronic
gear exceeded the
specified value.
• The change in position
command is too large.
• The backlash
compensation amount is
too large.
3 P.A-135
3842 0000
hex
Command
Generation
Error
During position
command processing,
an error such as a
calculation range error
occurred.
During position command
processing, an error such as
an “over the calculation
range“ error occurred.
3 P.A-136
3843 0000
hex
Following
Error
Counter
Overflow 1
The absolute encoder
position in pulses
divided by the
electronic gear ratio
exceeded ±2
31
(2,147,483,648).
The absolute encoder
position in pulses divided by
the electronic gear ratio
exceeded ±2
31
(2,147,483,648).
3 P.A-136
3844 0000
hex
Following
Error
Counter
Overflow 2
The position following
error in pulses
exceeded ±2
29
(536,870,912). Or, the
position following error
in command units
exceeded ±2
2
30
(1,073,741,824).
• There is insufficient force.
• There is insufficient gain.
• The external encoder
wiring is incorrect.
3 P.A-137
3845 0000
hex
Interface
Input
Duplicate
Allocation
Error 1
There is a duplicate
setting in the input
signal (IN1, IN2, IN3,
and IN4) function
allocations.
There is a duplicate setting in
the input signal (IN1, IN2,
IN3, and IN4) function
allocations.
3 P.A-138
3846 0000
hex
Interface
Input
Duplicate
Allocation
Error 2
There is a duplicate
setting in the input
signal (IN5, IN6, IN7,
and IN8) function
allocations.
There is a duplicate setting in
the input signal (IN5, IN6,
IN7, and IN8) function
allocations.
3 P.A-138
Event
code
Event name Description Assumed cause
Level
Reference
Maj
Prt
Min
Obs
Info
 Loading...
Loading...
