6
HINWEIS
Beschädigung durch falsche Reinigungsmittel. Vermeiden Sie die
Verwendung aggressiver Reinigungsmittel.
Diese können zu Beschädigungen von Lagern, Dichtungen und Kunst-
stoffteilen führen.
2.4 Funktion
Die Ottobock Systemhände -passiv- sind in folgenden Ausführungen verfügbar:
• 8K18=L/R* mit metrischem Gewinde M12x1.5
• 8K19=L/R* mit Zollgewinde ½“-20
Zu den verschiedenen Größen siehe Tabelle Kap. 3.
gesunden Hand am Daumen geöffnet. Sie schließt selbsttätig.
Die Griffkraft lässt sich durch Drehung an der Linsensenkschraube unter-
halb des Chassis einstellen (Abb. 1):
Rechts stärker
Links schwächer
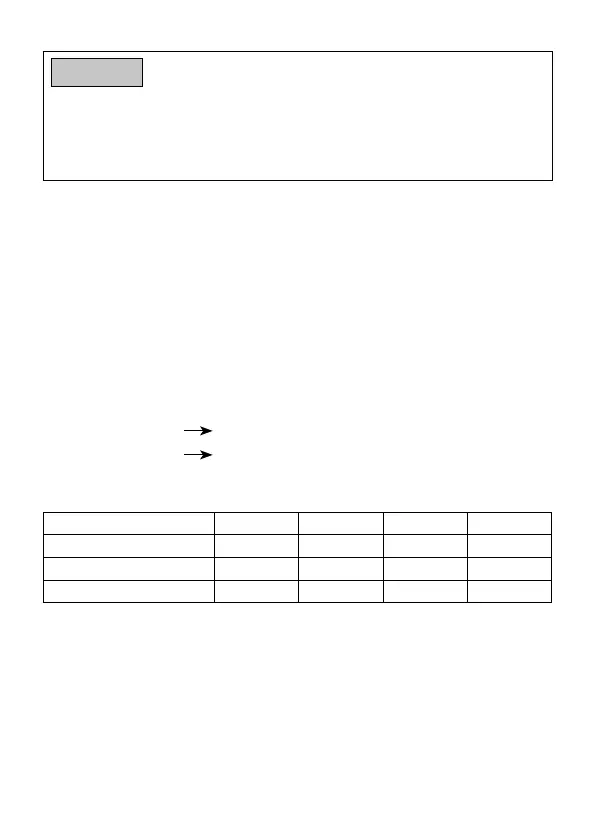
3 Technische Daten
Größe 6¾ 7¼ 7¾ 8
Gewicht [g] 185 250 280 290
Gesamthöhe [mm] 125 152 155 157
Daumenlänge [mm] 105 132 135 137
4 Handhabung
4.1 Montage
Die Systemhände -passiv- sind an ein Ottobock Handgelenk zu montieren.
Bei überlangem Unterarm- oder Handgelenkstumpf ist das Chassis auszu-
tauschen. Folgende Chassis werden – mit Eingussring 9E94=* – verwendet:
• 9S96=40 bei Handgröße L/R6¾
• 9S184=* bei Handgrößen L/R7¼, L/R7¾ und L/R8