96
奥托博克被动型系统手通过食指、中指和拇指实现三指抓握。该被动型系
统手通过健康手拉开拇指打开,并自动合拢。
通过旋转底盘下面的半沉头螺钉,可以调整握持力的大小(图1):
向右旋转 握持力增强
向左旋转 握持力减弱
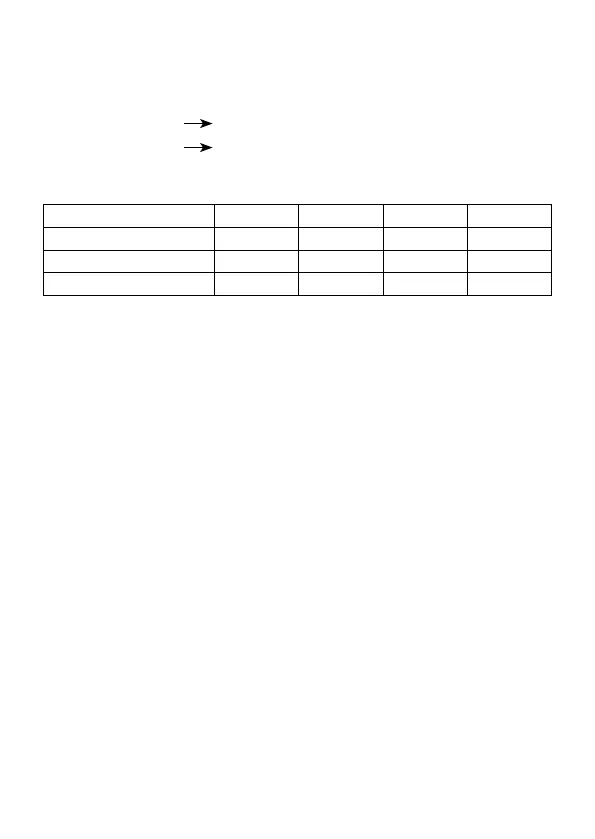
3 技术参数
尺寸
6¾ 7¼ 7¾ 8
重量(克)
185 250 280 290
总体高度(毫米)
125 152 155 157
拇指长度(毫米)
105 132 135 137
4 操作
4.1 装配
被动型系统手与奥托博克腕关节配套使用。
对于超长前臂或腕关节残肢,需更换手底盘。与9E94=*浇铸环配套使用
下列底盘:
• 9S96=40 适用于尺寸为L/R6 ¾的内手
• 9S184=* 适用于尺寸为L/R7 ¼,L/R7 ¾ 和L/R8的内手
用506G4=*螺钉将上述部件紧固(图2)。
必须在更换的底盘上为弹簧夹具钻孔(图1,见箭头指向)。
使用640F18硅胶套用硅油将内手穿到系统手上比较容易。
在穿戴装饰手套时,为了避免造成损坏,可使用711M1装配工具将假手锁
定,并将711M2接受盘固定在工作台或墙上(图3)。
4.2 组合可能
奥托博克被动型系统手可与组件式上肢假肢的连接件以及奥托博克腕关
节配套使用。如与腕关节配套使用,必须从腕关节的配件中选择合适的
连接件。
5 法律说明
所有法律条件均受到产品使用地当地法律的约束而有所差别。
 Loading...
Loading...










