Figure 4-6
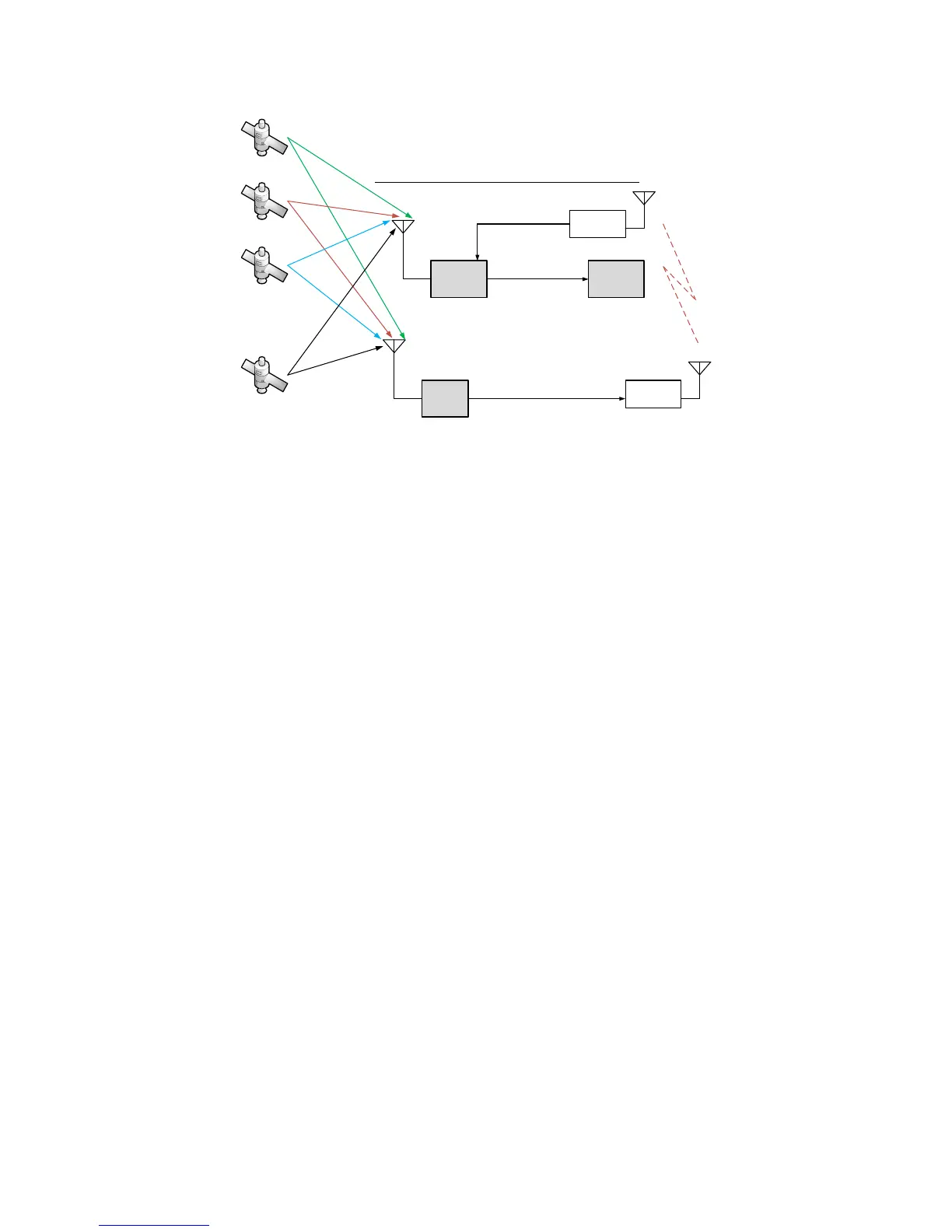
For line-of-sight precision guidance applications that do not use Mission Planner with MAVLink
protocol as in figure 4-6, user can configure one Alpha RTK receiver as RTK base and use 6-pin UART
connector port or micro-USB port to connect to a telemetry radio for sending correction data to the
RTK rover. Another Alpha RTK receiver is configured as RTK rover, using pin-2 of the 6-pin connector to
connect to another telemetry radio for receiving correction data from the RTK base, and using pin-3 of
the 6-pin connector to send RTK NMEA message output to the real-time controller.
 Loading...
Loading...


