Chapter 3
10 TM-1 Tilt Module Installation & Reference Manual
Using a Viper II or Viper Pro
To configure the TM-1 Tilt Module using the Viper II or Viper Pro console:
1. Select Menu, then Setup, and Comm Ports. If the Raven TM-1 tilt sensor has been installed properly, the
Inline Tilt button will be displayed on the GPS Comm Port Setup screen.
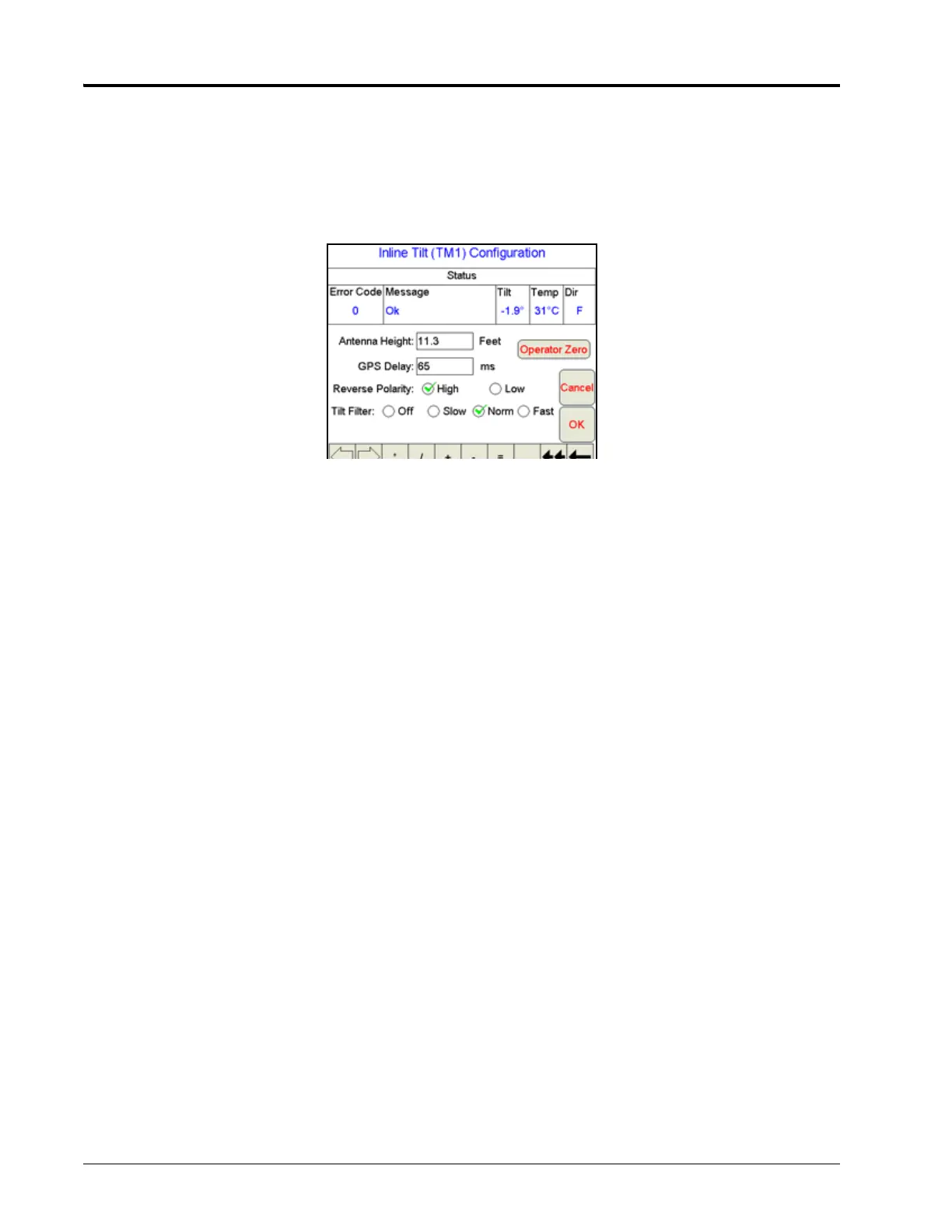
2. Select Inline Tilt. The following screen displays.
The following features and settings may be set from this screen:
Antenna Height. To properly adjust the GPS signal for machine tilt, set the height of the GPS antenna above
ground. Review the Antenna Height section on page 6 for detailed instructions.
GPS Delay. There is a slight delay from when a GPS receiver calculates a position solution until the solution is
transmitted over a serial connection. In order to synchronize TM-1 sensor information with this position
message, a time delay must be entered. For most receivers running at 10 Hz, the default delay of 65 ms is
adequate.
Reverse Polarity. This feature is currently not in use. Set this option to high.
Tilt Filter. The filter speed may be set to off, slow, medium, and fast.
Note: Rougher terrain will require slower filter speeds. To provide the best possible tilt compensation,
select the fastest filter speed that provides a stable guidance path.
Operator Zero. On level ground the current reading should display a zero tilt angle. If the display shows a non-
zero tilt angle on known level ground, touch the Operator Zero button to recalibrate the TM-1 to a level
condition.
The following information is also displayed on the TM-1 Configuration screen:
Current Tilt Angle. Displays the current tilt angle in degrees. Once the tilt sensor has been zeroed out on level
ground, the tilt reading should be 0°.
Note: The maximum tilt angle which the TM-1 may register is ±45° from a level surface.
Temperature. Displays the current temperature of the tilt sensor.
Direction of Operation. Displays the current direction of travel of the machine. The two possible directions
are F (forward) and R (reverse).
 Loading...
Loading...

