24
PID Adjustments
In some applications, it may be necessary to fine tune the
Auto-Tune calculated PID parameters. To do this, a chart
recorder or data logging device is needed to provide a visual
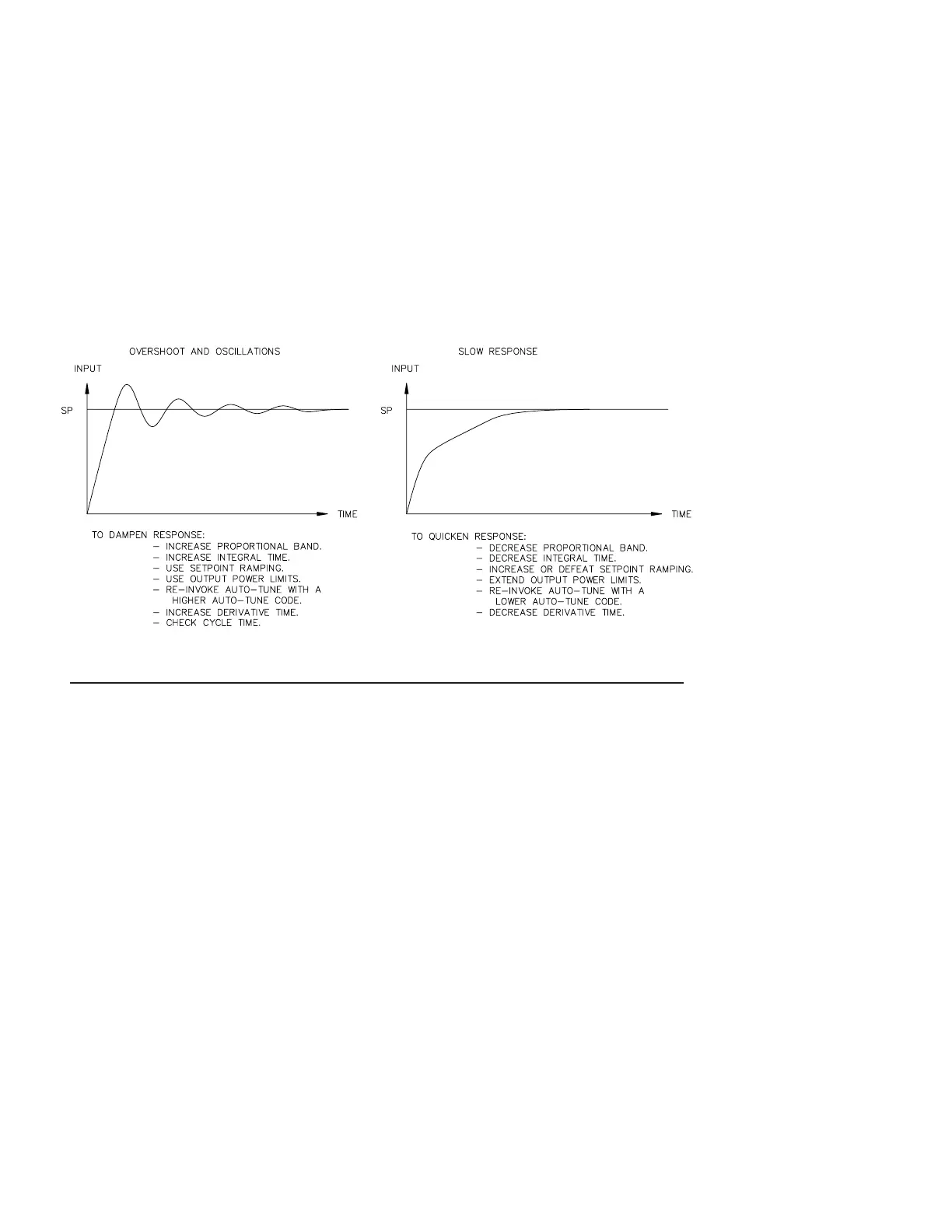
means of analyzing the process. Compare the actual process
response to the PID response figures with a step change to the
process. Make changes to the PID parameters in no more than
20% increments from the starting value and allow the process
sufficient time to stabilize before evaluating the effects of the new
parameter settings.
In some unusual cases, the Auto-Tune function may not yield
acceptable control results or induced oscillations may cause
system problems. In these applications, Manual Tuning is an
alternative.
PROCESS RESPONSE EXTREMES
MANUAL TUNING
A chart recorder or data logging device is necessary to
measure the time between process cycles. This procedure is an
alternative to the controller’s Auto-Tune function. It will not
provide acceptable results if system problems exist.
1. Set the Proportional Band (
&+;&) to 10.0% for temperature
models (T16) and 100.0% for process models (P16).
2. Set both the Integral Time (
12,,) and Derivative Time (-'+,) to
0 seconds.
3. Set the Output Dampening Time (
"&-&) in Output Module 8."&
to 0 seconds.
4. Set the Output Cycle Time [CYCt] in Output Module
8."& to no
higher than one-tenth of the process time constant (when
applicable).
5. Place the controller in Manual
%)'+ Control Mode ,+2/ in the
Hidden Loop and adjust the % Power to drive the process
value to the Setpoint value. Allow the process to stabilize after
setting the % Power. Note:
,+2/ must be set to *E-' in
Parameter Lockouts Module
3.#4.
6. Place the controller in Automatic (
:>,;) Control Mode ,+2/ in
the Hidden Loop. If the process will not stabilize and starts to
oscillate, set the Proportional Band two times higher and go
back to Step 5.
7. If the process is stable, decrease Proportional Band setting by
two times and change the Setpoint value a small amount to
excite the process. Continue with this step until the process
oscillates in a continuous nature.
8. Fix the Proportional Band to three times the setting that
caused the oscillation in Step 7.
9. Set the Integral Time to two times the period of the oscillation.
10. Set the Derivative Time to 1/8 (0.125) of the Integral Time.
11. Set the Output Dampening Time to 1/40 (0.025) the period of
the oscillation.

 Loading...
Loading...
