5th Ed. Feb 15, 08 3-7
S–TEC
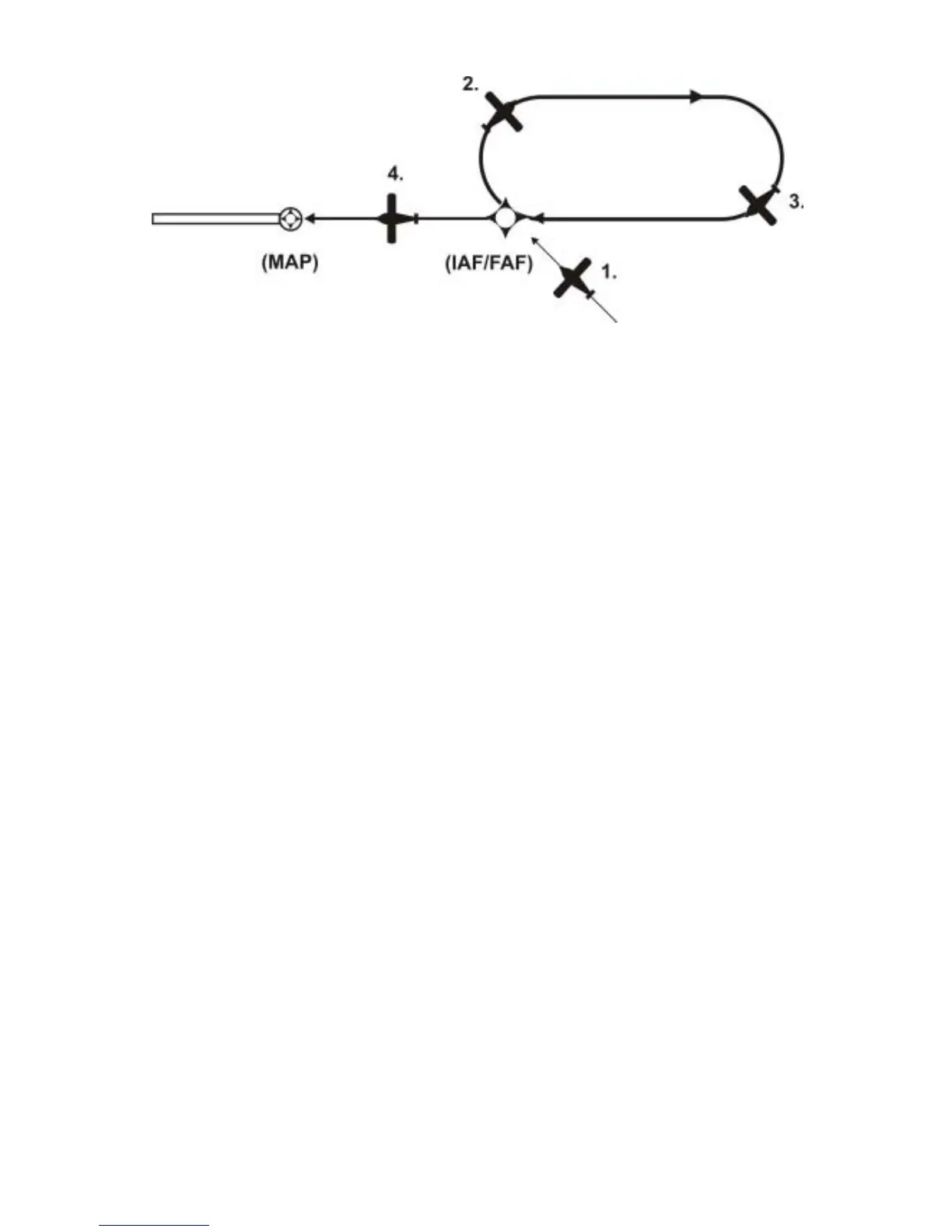
Fig. 3-3. GPS Approach with Holding Pattern
1. a. Set the Heading Bug under the Lubber Line.
b. Engage the GPSS Converter's HDG mode.
c. Engage the autopilot's HDG mode.
d. Program the GPS Navigator with the desired approach.
e. Engage the GPSS Converter's GPSS mode.
f. The autopilot begins tracking to the Initial Approach Fix (IAF).
Note:
Perform steps 2-3 only for those GPS Navigators that do not have
the capability to execute a holding pattern.
2. a. Engage the GPSS Converter's HDG mode.
b. Lead the aircraft around the outbound leg of the holding pattern in 90°
increments, using the Heading Bug.
3. a. Engage the GPSS Converter's GPSS mode.
b. The autopilot begins tracking to the Final Approach Fix (FAF).
4. a. The autopilot becomes established on the inbound course.
b. At the Missed Approach Point (MAP), disconnect the autopilot for a landing
or go-around, as required.