Parameter description
Note
The busy parameter must not be overwritten by the user. It is supplied and checked by the
function block, and must be supplied with a global variable created by the user only when the
respective function block is called. This parameter coordinates the individual function blocks
for the POSMO A. This ensures that no more than one function block can access a POSMO A
at the same time.
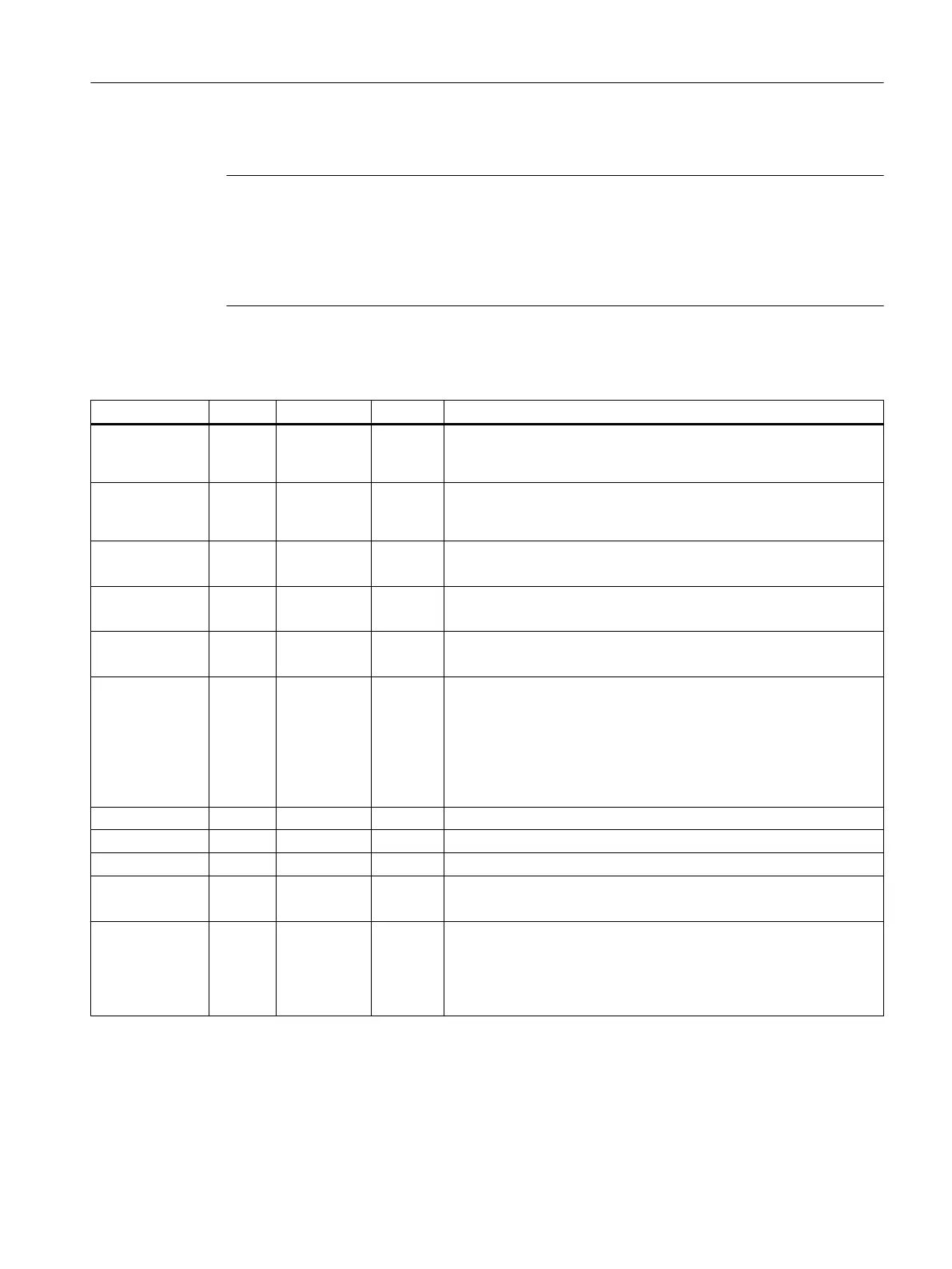
Table 3-2 Parameters of the _POSMOA_nControl function block
Name P type
1)
Data type Default Meaning
pkwIn IN AR‐
RAY[0..7] of
BYTE
8(16#00) Transfer I/O inputs of POSMO A to _POSMOA_nControl FB
pzdIn IN AR‐
RAY[0..3] of
BYTE
4(16#00) Transfer I/O inputs of POSMO A to FB
init IN BOOL FALSE = TRUE: Sets the drive to "Ready to start"
STW = 0x040E
enable IN BOOL FALSE = TRUE: Sets the drive to "Ready for operation"
The drive is now ready for operation (provided there are no errors).
releaseBrake IN BOOL FALSE = TRUE: Release holding brake
= FALSE: Brake sequence control effective
accelTime IN DINT 0 Ramp-up/ramp-down time [ms]
During this time, the setpoint is adjusted in speed-controlled mode
as follows:
● Ramp-up: From zero to the maximum permissible actual speed
● Ramp-down: From the maximum permissible actual speed to
zero
releaseRamp IN BOOL FALSE = TRUE: Release ramp-function generator output
startRamp IN BOOL FALSE = Edge FALSE → TRUE: Start ramp-function generator
setpoint IN INT 0 Speed setpoint
releaseSetpoint IN BOOL FALSE Setpoint release
= TRUE: Setpoint released
resetError IN BOOL FALSE Acknowledge error
1. Remedy cause of error
2. FALSE → TRUE edge
3. Parameter must remain set to TRUE until driveError = FALSE.
Function blocks
3.3 Function block _POSMOA_nControl
Supplement to SIMODRIVE POSMO A Positioning Motor
Function Manual, 01/2015 25

 Loading...
Loading...









