Parameter description
Note
The SIMOTION identifiers have changed as of V4.0.
You can find a comparison of SIMOTION and SIMATIC names in the Appendix SIMOTION
and SIMATIC names (Page 51).
The busy parameter must not be overwritten by the user. It is supplied and checked by the
function block, and must be supplied with a global variable created by the user only when the
respective function block is called. This parameter coordinates the individual function blocks
for the POSMO A. This ensures that no more than one function block can access a POSMO A
at the same time.
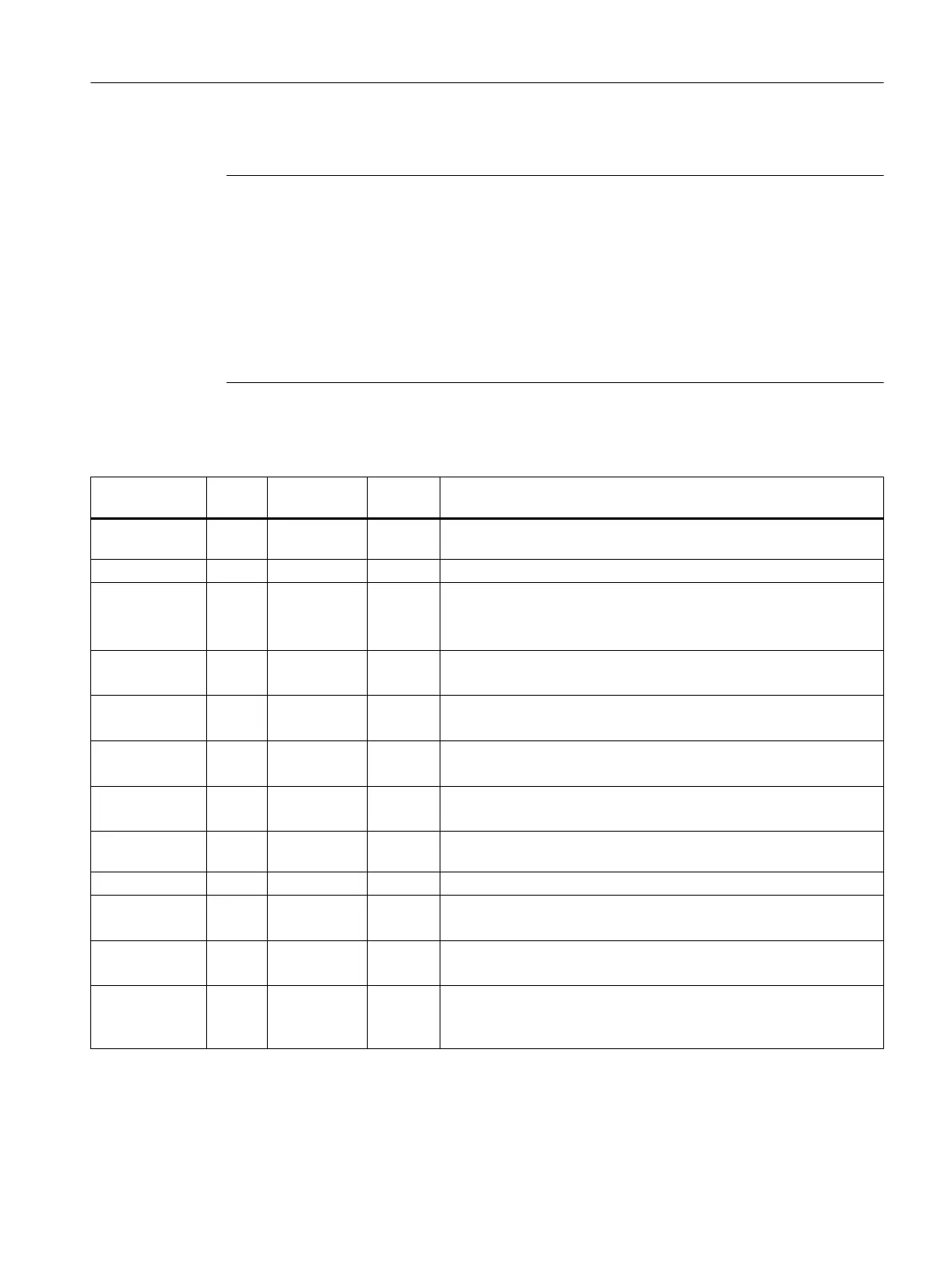
Table 3-3 Parameters of the _POSMOA_rwParameter function block
Name P type
1)
Data type Default Meaning
pkwIn IN ARRAY [0..7]
of BYTE
8(16#00) Transfer I/O inputs of POSMO A to FB
paraNumber IN UINT 0 Parameter number to be read or written
subindex IN USINT 0 Subindex
= 0 for parameters with no index
This value is the array index for parameters with an array.
2)
enableRead IN BOOL FALSE = TRUE: Reads parameter cyclically
= edge FALSE → TRUE: Reads parameter one time
execWrite IN BOOL FALSE = edge FALSE → TRUE: Writes parameter
When set simultaneously with enableRead, read is executed.
setDefault IN BOOL FALSE = edge FALSE → TRUE: Loads factory settings
When set simultaneously with enableRead, read is executed.
saveParameter IN BOOL FALSE = edge FALSE → TRUE: Saves parameter
When set simultaneously with enableRead, read is executed.
pkwOut IN/OUT ARRAY [0..7]
of BYTE
- Prepared FB data transferred to the I/O outputs of the POSMO A
busy IN/OUT BOOL - Coordination of the FBs
realValue IN/OUT REAL - Write → value to be written (data types C4 and N2)
2)
Read → value to be read (data types C4 and N2)
2)
dintValue IN/OUT DINT - Write → value to be written (data types I2, T2, V2 and T4)
2)
Read → value to be read (data types I2, T2, V2 and T4)
2)
done OUT BOOL FALSE = TRUE: When current request has been completed
= FALSE: There is no request pending, or a request is being execu‐
ted.
Function blocks
3.4 Function block _POSMOA_rwParameter
Supplement to SIMODRIVE POSMO A Positioning Motor
Function Manual, 01/2015 31

 Loading...
Loading...









