Operation
85
SIP ART PS2 Manual
A5E00074631-01
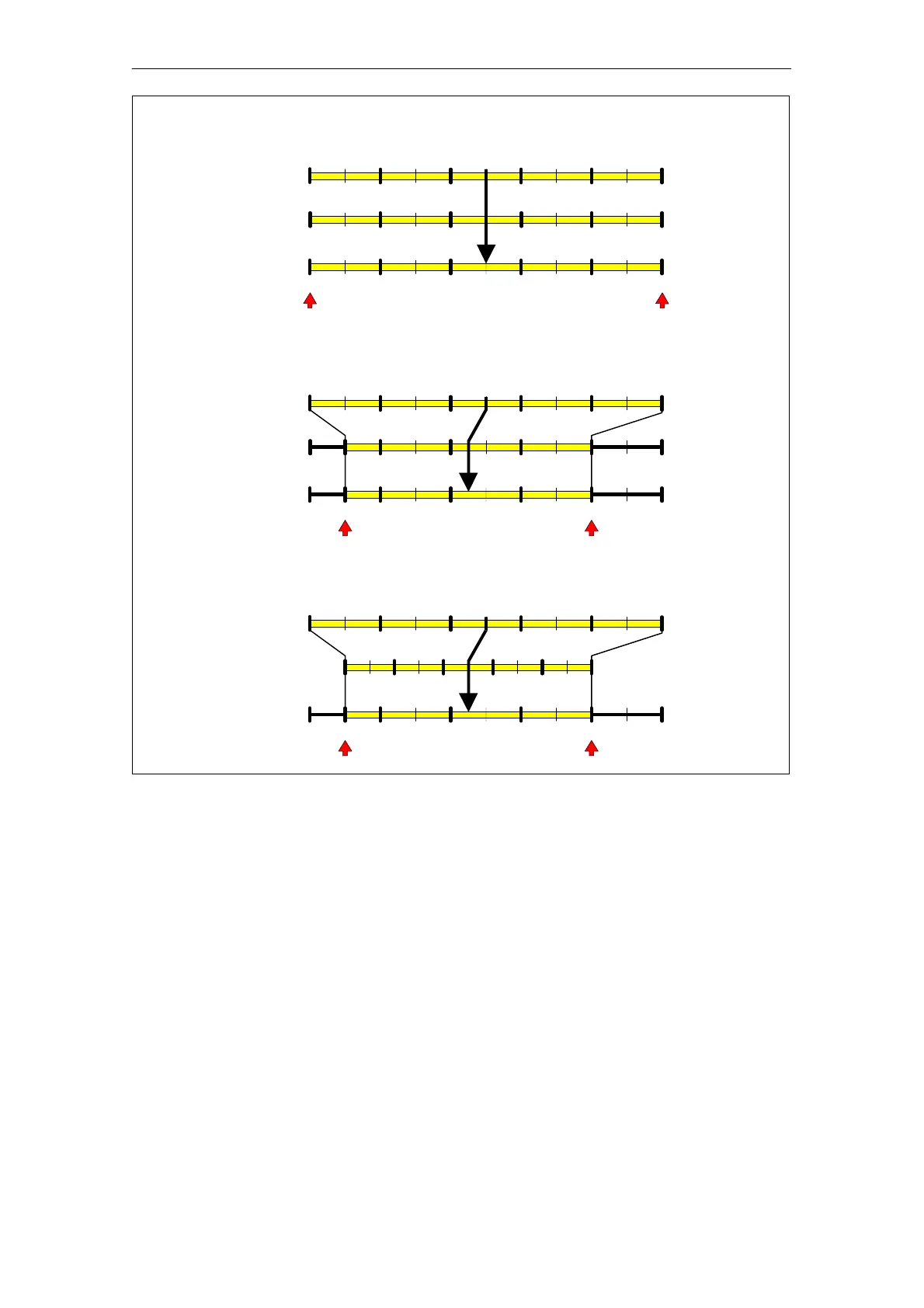
Example:
YNRM = FLOW with YA = 10 % and YE = 80 %
YNRM = MPOS o r YNRM = FLOW
Presetting: YA = 0% and YE = 100%
Input current
(setpoint)
X display
W display
X display
W display
X display
W display
Mechan. Stroke
(actual value)
Mechan. Stroke
(actual value)
Mechan. Stroke
(actual value)
0mm
0mm
0mm
80mm
80mm
80mm
16mm
16mm
16mm
32mm
32mm
32mm
48mm
48mm
48mm
64mm
64mm
64mm
0%
0%
0%
100%
100%
100%
20%
20%
20%
40%
40%
40%
50%
50%
50%
60%
60%
60%
80%
80%
80%
YE = 80%
YE = 80%
YE = 100%
YA = 10%
YA = 10%
YA = 0%
Example:
YNRM = MPOS with YA = 10 % and YE = 80 %
4mA 20mA7.2mA 10.4mA 13.6mA 16.8mA
Input current
(setpoint)
Input current
(setpoint)
4mA 20mA7.2mA 10.4mA 13.6mA 16.8mA
4mA 20mA7.2mA 10.4mA 13.6mA 16.8mA
Figure 4-9 Dependence on the stroke of standardization and on YA and YE in the example of an
80 mmlinear actuator
Manipulated variable direction of action
The direction of action (rising or falling) of the display and the position
feedback (Iy) can be set with this.
Manipulated variable sealing (see figure 4-8, page 83)
With this function the valve can be driven to the seat with the maximum
actuating force of the actuator (continuous contact of the piezo--val-
ves). The sealing function can be activated on one side or for both limit
positions. YCLS becomes active when the setpoint is below the value
set with parameter “40.YCDO” or above that set with parameter
“41.YCUP”.
38.YDIR
39.YCLS
 Loading...
Loading...


