11
AUTOMOTIVE DEAD-RECKONING (ADR)
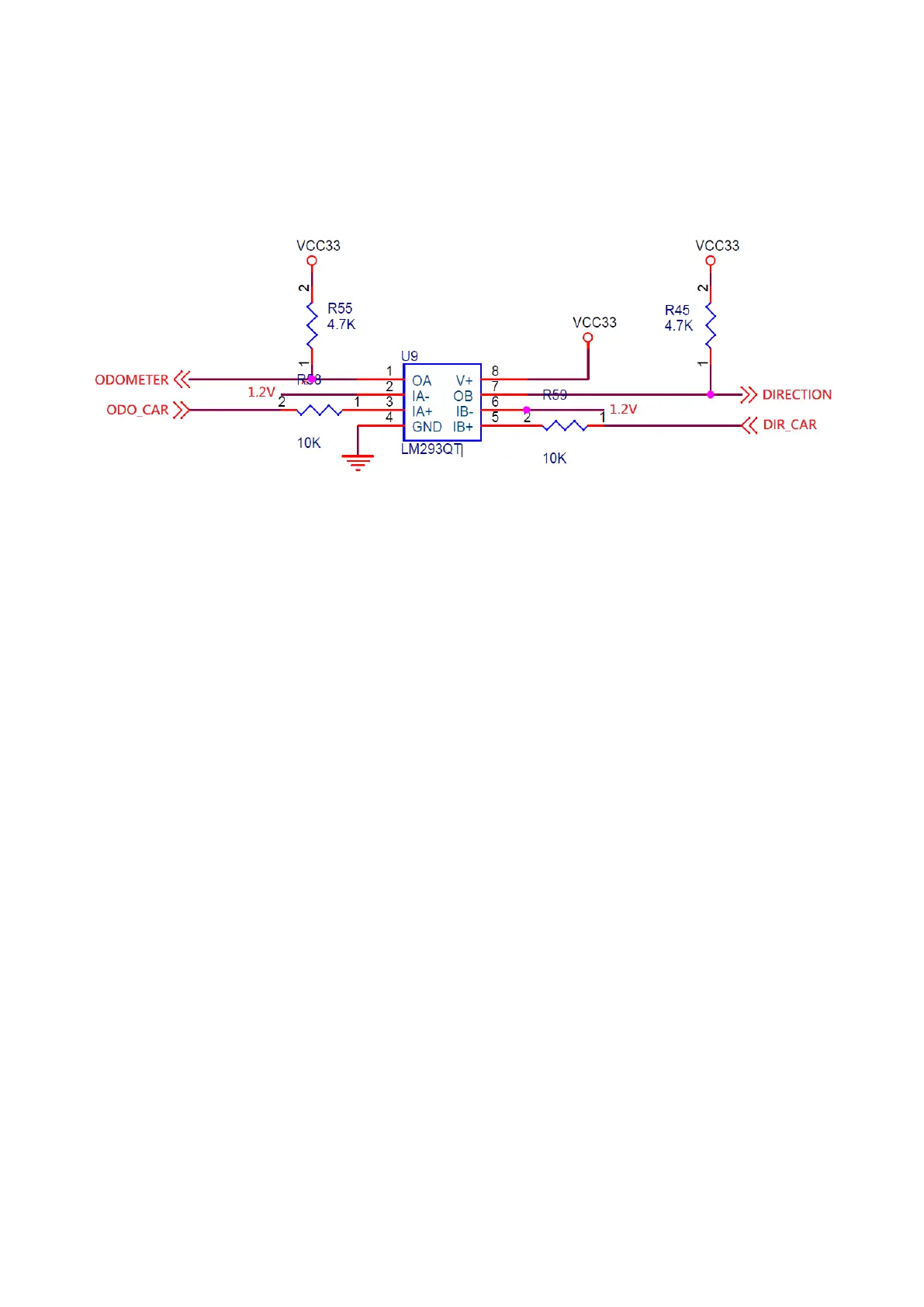
For ADR type of application where vehicle odometer wheel-tick pulse signal is available, connect pin-22 ODOMETER to
the wheel-tick signal through appropriate level shifter such that the wheel-tick signal level is within range of LVTTL (0V
~ 3.3V). Similarly connect pin-23 DIRECTION to the vehicle forward/reverse signal. For ADR applications that has no
forward/reverse indication signal, simply ground the DIRECTION input. Below is a level shifter example circuitry.
ODOMETER-LESS DEAD-RECKONING (ODR)
If the vehicle odometer wheel-tick pulse signal is not available, then PX1175RDP can operate in odometer-less
dead-reckoning mode without the need of external connection to ODOMETER and DIRECTION pins.
When changing between ADR and ODR mode of operation, cold start command should be issued, or the V_BCKP
power should be removed such that internal DR state will be cleared and PX1175RDP will re-do DR calibration.
CALIBRATION of DR
PX1175RDP performs calibration of gyro bias and odometer scale automatically using GNSS. Customer is not required
to perform calibration at installation.
For product testing or benchmarking, the following procedure steps can achieve efficient calibration quickly after a
short period of time:
1. Find a open sky place.
2. Start PX1175RDP and stand still for 60 seconds until position fix is achieved.
3. Drive straight for 500m at speed of at least 40km/hr.
4. For next 3 minutes, drive straight and make at least 360-deg turns (either two 90-degrees left turns and right turns,
or four left turns, or four right turns) then drive straight for at least another 300m.