Strasbaugh Software Calibration Procedures
Version 4.0 - February 1998 10 - 87
5. Select LT Send Elev Move and choose Slot 1 to move the left send
elevator to slot 1.
Notes:
• Move the right send elevator to Slot 1
• Move the left receive elevator to Slot 25
• Move the right receive elevator to Slot 25
6. Select Robot Up/Down Move and choose Top to move the robot Z-axis
to its top position.
Notes:
• At the right send elevator, choose Top.
• At the left receive elevator, choose Middle.
• At the right receive elevator, choose Middle.
7. Select Robot Arms Move and choose Left Send to move the robot arm
to left send position, extending the arm out over the target drawn on the
guide wafer.
8. Evaluate the position of the robot arm:
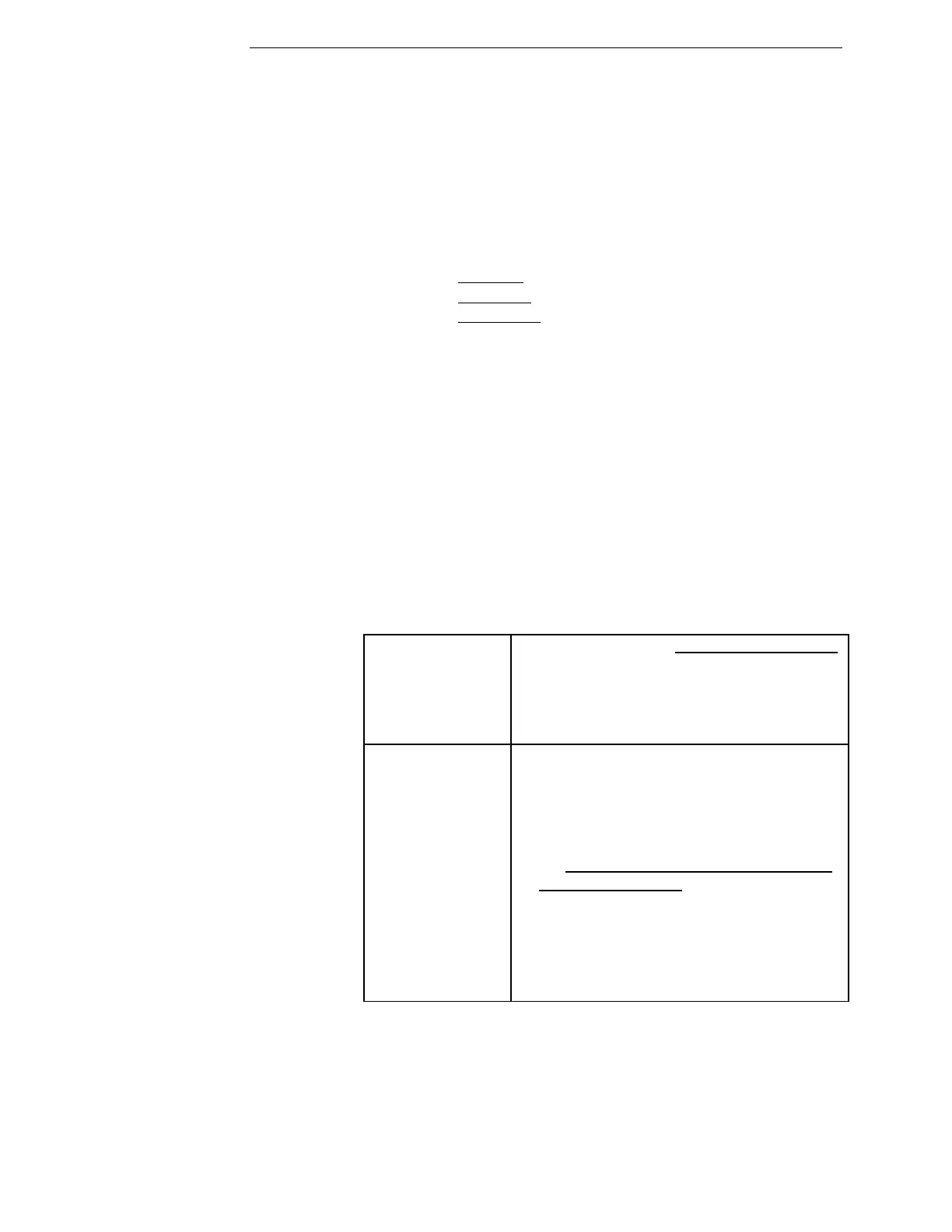
ALIGNMENT
GOAL AT SEND
ELEVATORS:
The robot arm must be aligned within the target
both
• linearly (side to side)
and
• radially (in and out).
ALIGNMENT
GOAL AT
RECEIVE
ELEVATORS:
The robot arm must be
• aligned within the target linearly (side to
side)
and
• positioned radially (in and out) with a .0625
in. (1/16-in.) gap between the end of the arm
and the target outline at a point nearest the
front of the machine.
Note: The .0625 in. gap allows a small safety
distance at the receive cassettes to prevent the
wafers from getting jammed against the back of the
cassette.
a. If the robot arm position meets the goal, skip to When a Satisfactory
Adjustment Is Achieved, below in this section.
 Loading...
Loading...