Strasbaugh Software Calibration Procedures
Version 4.0 - February 1998 10 - 89
Procedure
1. Estimate whether the linear travel (side to side) positioning or the radial
(in/out) positioning error is greater.
a. Correct the axis position of greater error first by following the
appropriate correction procedure, below.
b. When the axis position of greater error has been corrected, perform
the correction procedure for the axis position of lesser error by
following the appropriate correction procedure, below.
Linear Travel (Side to Side) Positioning Correction
Notes:
The linear positioning is corrected by increasing or decreasing the value of the
variable by .1-inch or smaller increments as needed. Make coarse adjustment
by changing the variable value in .1-inch increments; make fine adjustments with
.01-inch increments.
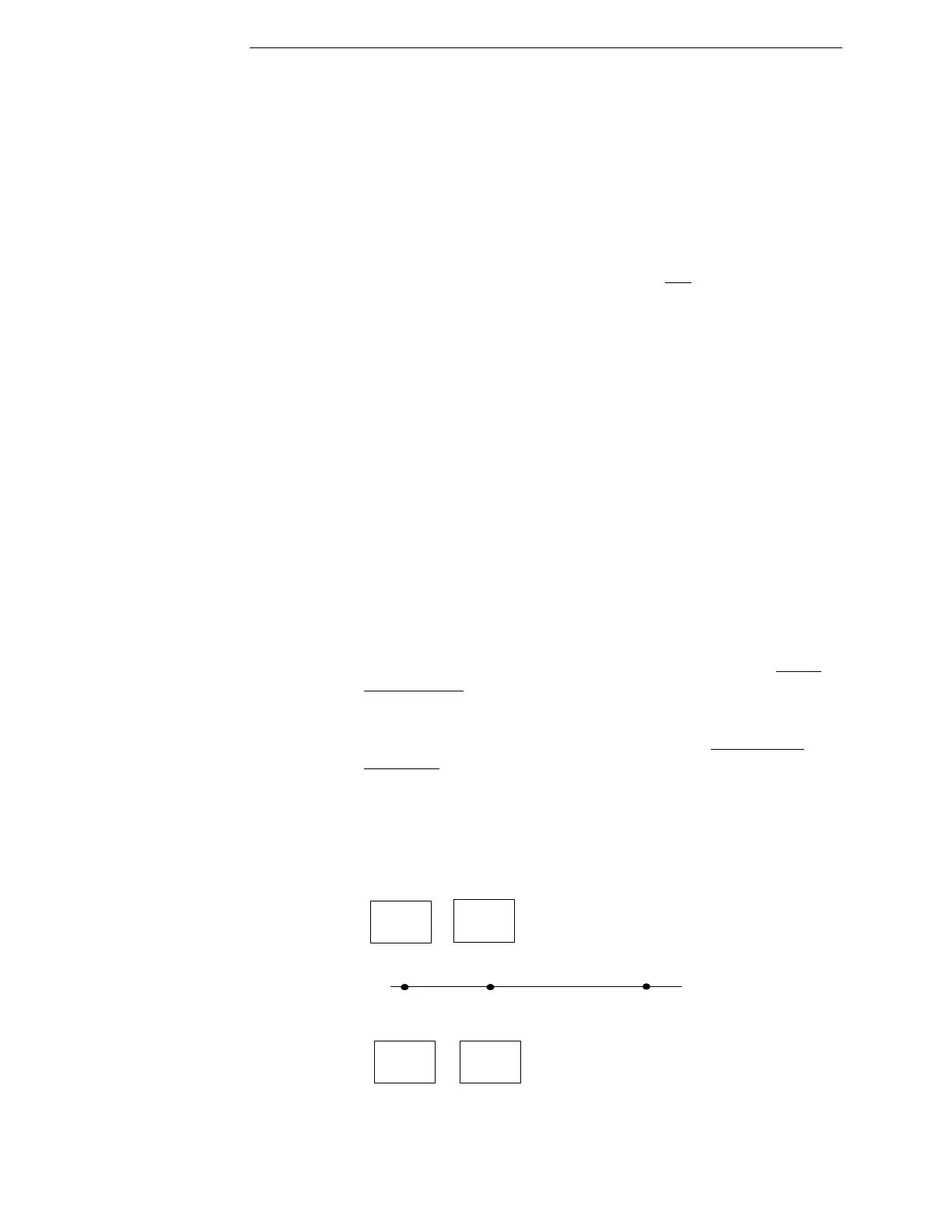
As shown in the sketch below, home for the robot’s linear axis is 0. Positions at
the elevators are always expressed in negative numbers.
• If the arm is too far away from the polish table, move the arm toward
the polish table by increasing the current value of the variable by .01 to
.1-inch increments.
• If the arm is too near the polish table, move the arm away from the
polish table by decreasing the current value of the variable by .01 to .1-
inch increments.
Figure 10-7 Sketch Showing Relationships of Values for Robot Linear Position
Calibration Variables at Elevators
Polish Table
Home
-35 in. -25 in. 0
Left Send
Elevator
Left Send
Elevator
Right Receive
Elevator
Left Receive
Elevator
 Loading...
Loading...