SunFounder GalaxyRVR Kit for Arduino, Release 1.0
3.2.1 Learning Objectives
• Understand the design principle of the Rocker-Bogie suspension system and its advantages.
• Learn how to design and make a basic model of the Rocker-Bogie suspension system.
• Apply basic principles of physics to explain how the Rocker-Bogie suspension system overcomes complex ter-
rains.
3.2.2 Materials
• Blueprints and reference materials (such as NASA Mars Rover design drawings and videos on how the Rocker-
Bogie suspension system works)
• Mars Rover structure kit
• Basic tools and accessories (e.g. screwdriver, screws, etc.)
3.2.3 Steps
Step 1: Unraveling the Rocker-Bogie System
The Rocker-Bogie system is like a mountain goat of mechanics - designed to keep all wheels of the rover grounded while
it navigates over rough and rocky terrains. It’s specially built for handling Mars’ unpredictable landscape, including
steep inclines and sizable boulders. This system skips springs and instead leverages the geometry of its six wheels
and their interactions to conquer tricky terrain. It’s a shining example of how clever mechanical design can surmount
environmental hurdles.
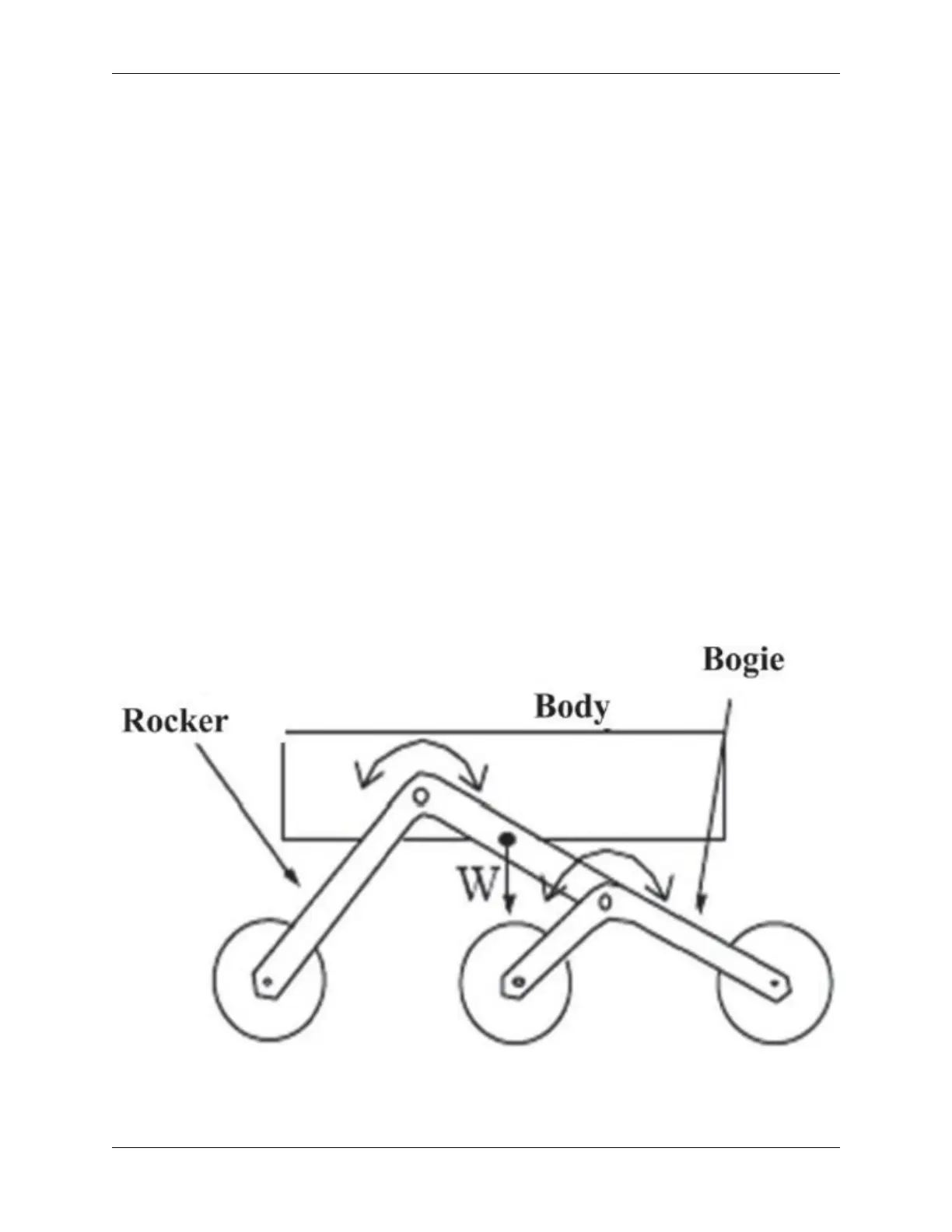
Let’s dive into the two main parts of this system - the “rocker” and the “bogie”.
• The “rocker” part of the system is like the two large limbs on either side of the rover’s body. These limbs, or
rockers, connect to each other and the rover’s body, or chassis, through a mechanism called a differential. Just
like two legs walking, the rockers rotate in opposite directions relative to the chassis, making sure that most of
20 Chapter 3. Course Mode
 Loading...
Loading...