SunFounder GalaxyRVR Kit for Arduino, Release 1.0
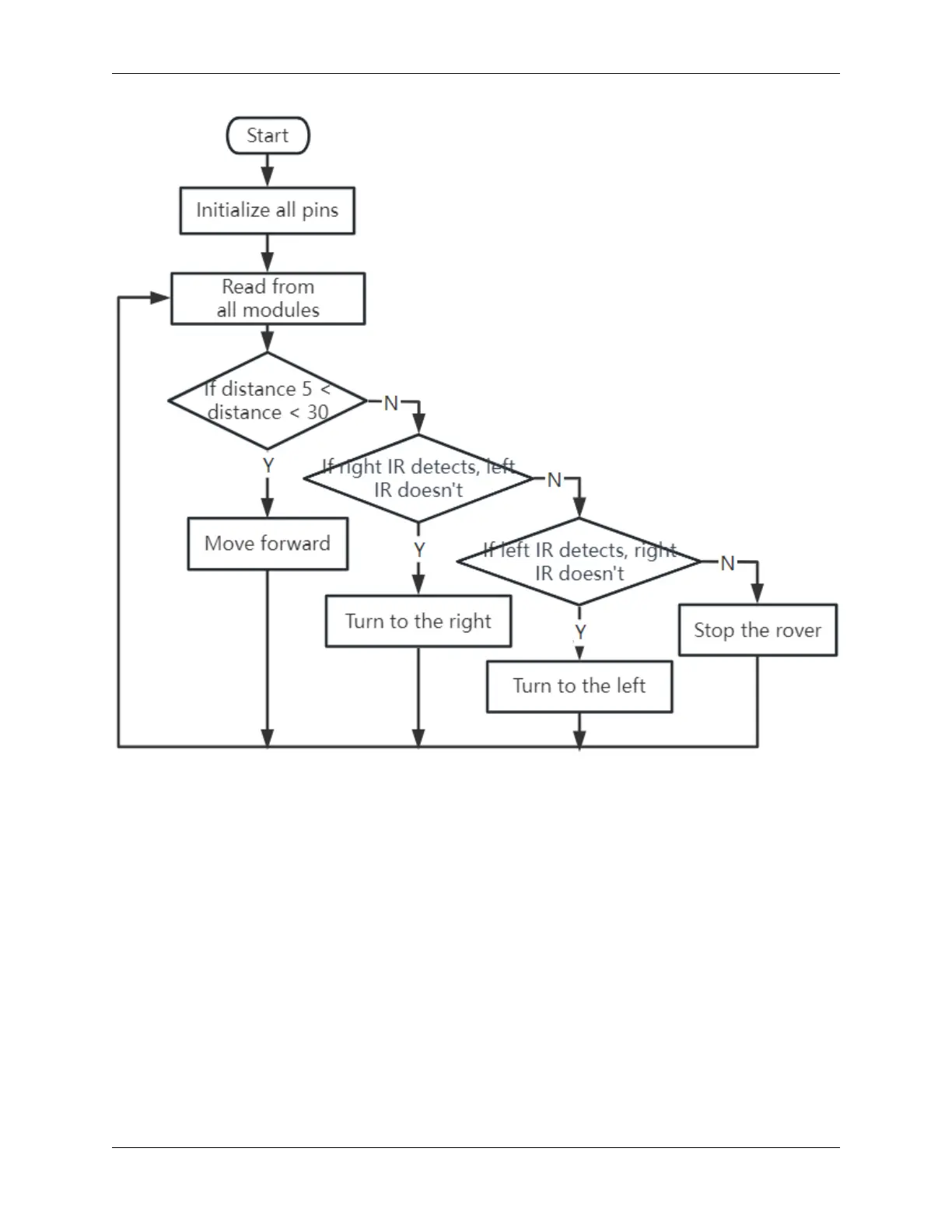
• If the ultrasonic sensor detects an object within 5-30 cm, our Rover should move towards it.
• If the left IR sensor detects an object, our Rover should take a left turn.
• If the right IR sensor detects an object, our Rover should take a right turn.
• In all other cases, our Rover should remain stationary.
Now, it’s time for us to complete the code.
Once the code is completed, test if the Rover follows your movements.
As we did with the obstacle avoidance system, it will be crucial to test our following system and troubleshoot any issues
that may arise. Ready to start?
Step 4: Summary and Reflection
Today, you’ve accomplished something amazing. You combined different modules and concepts to create an advanced
obstacle avoidance and following system for your Mars Rover. Remember, learning does not end here - keep exploring,
innovating, and applying your newfound skills to other projects.
Remember to always reflect on your learning process. Think about the following:
3.8. Lesson 8 Advanced Obstacle Avoidance and Intelligent Following System 69