3. Horizontal correcting function :
Place the
quadcopter
on a
horizontal
postion,
then
push
transmitter both left and right lever
to
lowest right conner for about 2-3 second
,
indicator
on the
quadcopter
changed
from
normal lights
up to
quickly
flashing
;After
2-3
second
,the
indicator
changed
to
normal lights,
it means the
quadcopter
restarted
/reset
successfully.
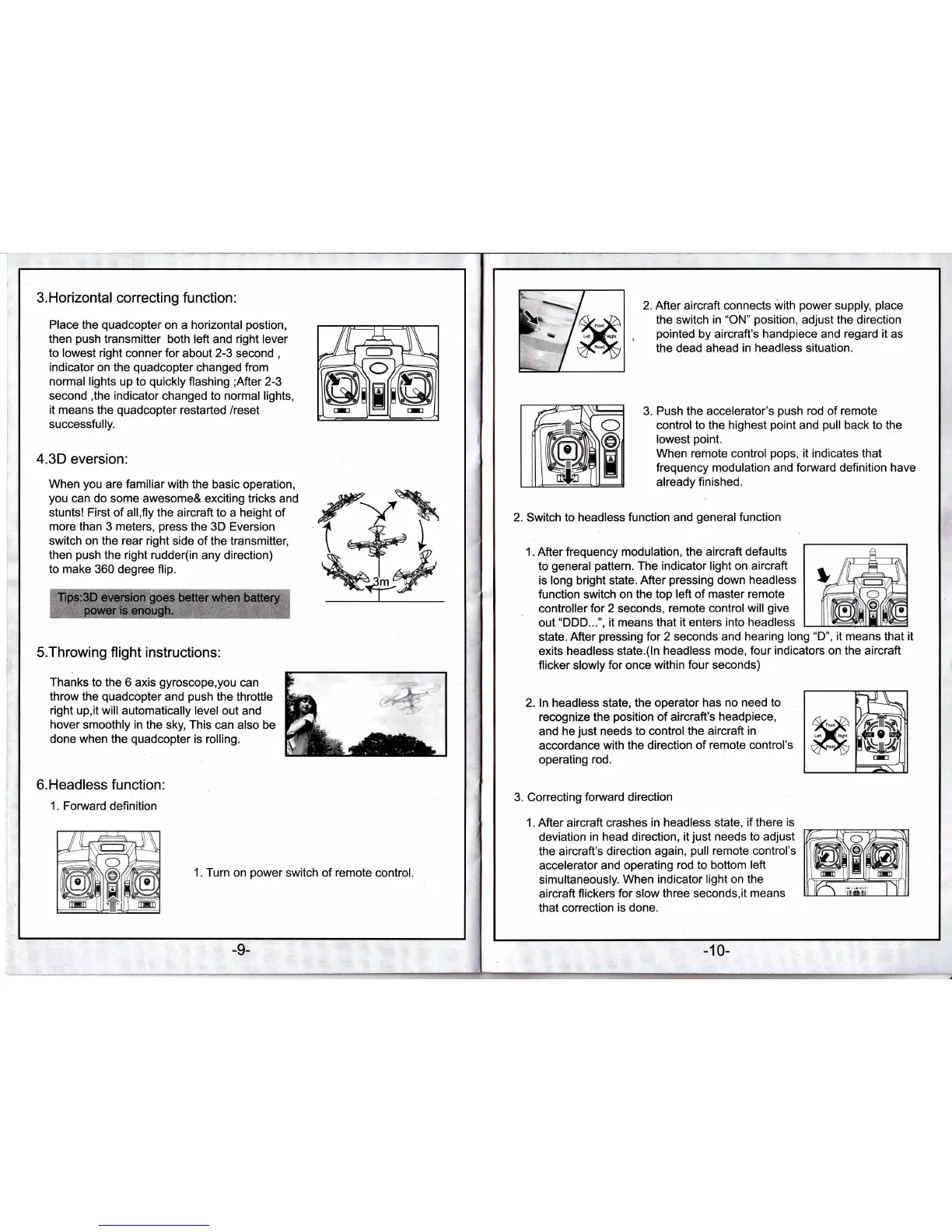
4.3D eversion:
When
you
are
familiar
with the basic operation,
you
can do some awesome&
exciting
tricks and
stunts! First
of all,fly
the
aircraft to a height of
more
than 3 meters,
press
the
3D
Eversion
switch on
the rear
right side
of
the transmitter,
then
push
the right
rudder(in any direction)
to make 360
degree flip.
5.Throwing fl ight instructions:
Thanks to the 6 axis
gyroscope,you
can
throw the
quadcopter
and
push
the
throttle
right
up,it will automatically
level out and
hover
smoothly in the sky, This
can also be
done when the
quadcopter
is rolling.
6.Headless function:
1. Foruvard
definition
1. Turn on
power
switch of remote
control.
-10-
ffi
t
K
2. Switch to headless
2. After
aircraft
connects with
power
supply,
place
the switch in
"ON"
position,
adjust the direction
pointed
by aircraft's
handpiece and regard it as
the dead ahead
in headless situation;
3.
Push the accelerator's
push
rod
of remote
control
to the highest
point
and
pull
back to the
lowest
point.
When remote control
pops,
it
indicates
that
frequency modulation and forward definition have
already finished.
function and
general
function
1. After frequency
modulation, the aircraft defaults
to
general pattern.
The indicator light on aircraft
is long bright
state. After
pressing
down
headless
function
switch
on the top
left
of
master remote
controller for 2 seconds,
remote
control
will
give
out
"DDD...",
it means
that it enters into headless
state. After
pressing
for 2 seconds and
hearing long
"D",
it means that it
exits headless state.(ln
headless
mode, four indicators on the aircraft
flicker slowly
for once within
four
seconds)
2. ln headless state,
the
operator
has no need
to
recognize
the
position
of
aircraft's
headpiece,
and he
just
needs
to
control
the aircraft
in
accordance
with the direction of
remote control's
operating rod.
3. Correcting
fonivard direction
1.
After aircraft
crashes in
headless state, if there
is
deviation in head direction,
it
just
needs to adjust
the aircraft's direction
again,
pull
remote control's
accelerator and operating
rod to bottom
left
simultaneously.
When indicalor
light on the
aircraft flickers
for
slow
three seconds,it means
that correction is done.
ffi
1) \\
fl*\
ffi

 Loading...
Loading...






