6-26
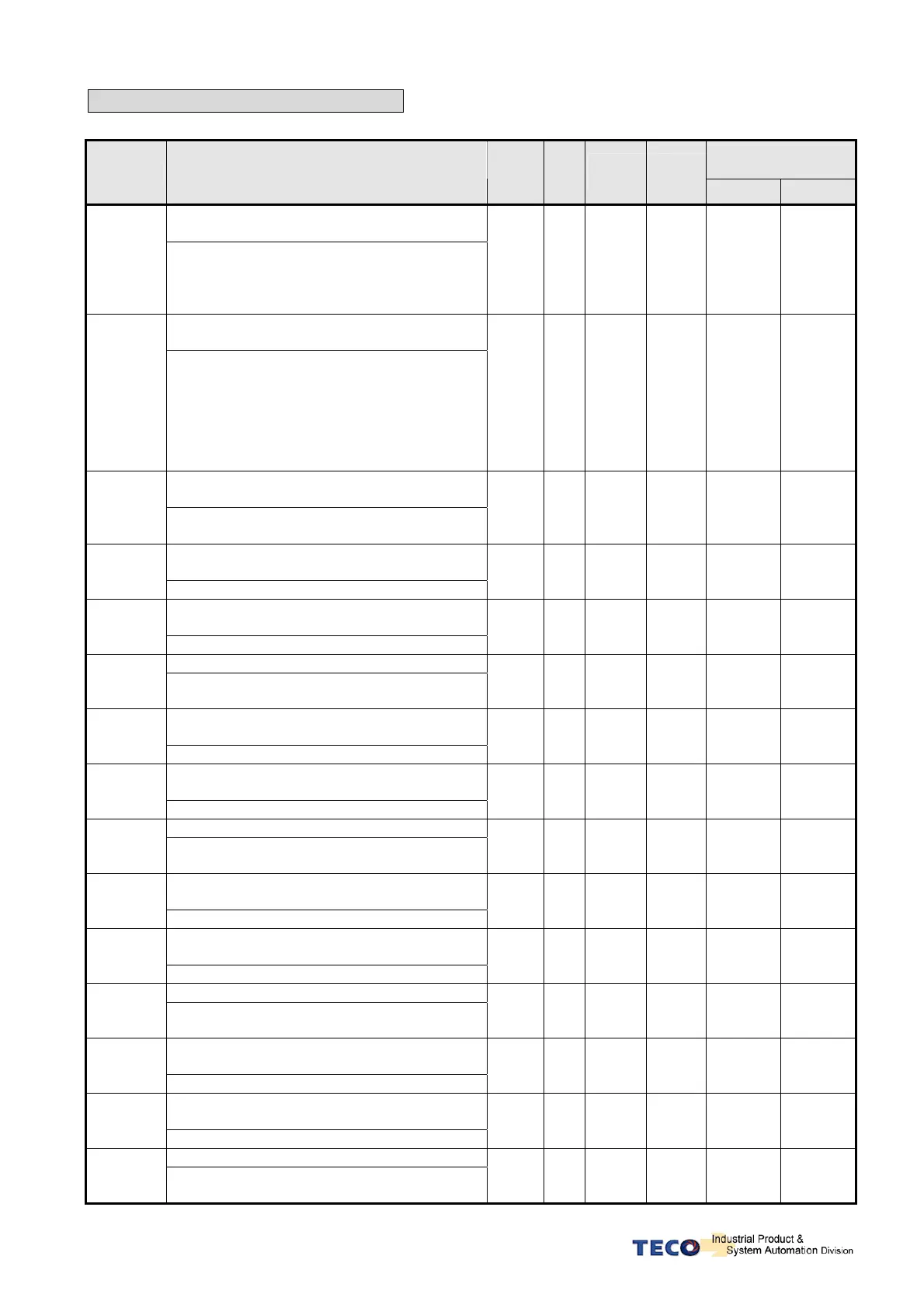
Internal Position Control Parameter
Communication
Address
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
RS232 RS485
Internal Position Command 1 – Rotation
Number
Pn401
Set the Rotation number of the internal
Position Command 1
Use input contacts POS1~POS5 to select
Refer to 5-4-2.
0 rev
-16000
│
16000
Pi 568H 0701H
Internal Position Command 1 - Pulse
Number
Pn402
Set the rotation pulse number of internal
position
Command 1
Internal Position Command 1 =Pn401(Rotation
Number) x
Pulse number of One Rotate x 4
+ Pn402(Pulse
number)
0 pulse
-131072
│
131072
Pi
56AH
56BH
0702H
0703H
Internal Position Command 1 - Move
Speed
Pn403
Setting the Move Speed of internal Position
Command 1
0 rpm
0
│
3000
Pi 569H 0704H
Internal Position Command 2-Rotation
Number
Pn404
Please refer to Pn401
0 rev
-16000
│
16000
Pi 56CH 0705H
Internal Position Command 2-Pulse
Number
Pn405
Please refer to Pn402
0 pulse
-131072
│
131072
Pi
56EH
56FH
0706H
0707H
Internal Position Command 2-Move Speed
Pn406
Please refer to Pn403
0 rpm
0
│
3000
Pi 56DH 0708H
Internal Position Command 3-Rotation
Number
Pn407
Please refer to Pn401
0 rev
-16000
│
16000
Pi 570H 0709H
Internal Position Command 3-Pulse
Number
Pn408
Please refer to Pn402
0 pulse
-131072
│
131072
Pi
572H
573H
070AH
070BH
Internal Position Command 3-Move Speed
Pn409
Please refer to Pn403
0 rpm
0
│
3000
Pi 571H 070CH
Internal Position Command 4 -Rotation
Number
Pn410
Please refer to Pn401
0 rev
-16000
│
16000
Pi 574H 070DH
Internal Position Command 4-Pulse
Number
Pn411
Please refer to Pn402
0 pulse
-131072
│
131072
Pi
576H
577H
070EH
070FH
Internal Position Command 4-Move Speed
Pn412
Please refer to Pn403
0 rpm
0
│
3000
Pi 575H 0710H
Internal Position Command 5 -Rotation
Number
Pn413
Please refer to Pn401
0 rev
-16000
│
16000
Pi 578H 0711H
Internal Position Command 5-Pulse
Number
Pn414
Please refer to Pn402
0 pulse
-131072
│
131072
Pi
57AH
57BH
0712H
0713H
Internal Position Command 5-Move Speed
Pn415
Please refer to Pn403
0 rpm
0
│
3000
Pi 579H 0714H