51
通訊位址
通訊位址通訊位址
通訊位址 參數
參數參數
參數
代號
代號代號
代號
名稱與機能
名稱與機能名稱與機能
名稱與機能 預設值
預設值預設值
預設值
單位
單位單位
單位
設定
設定設定
設定
範圍
範圍範圍
範圍
控制
控制控制
控制
模式
模式模式
模式
RS232
RS485
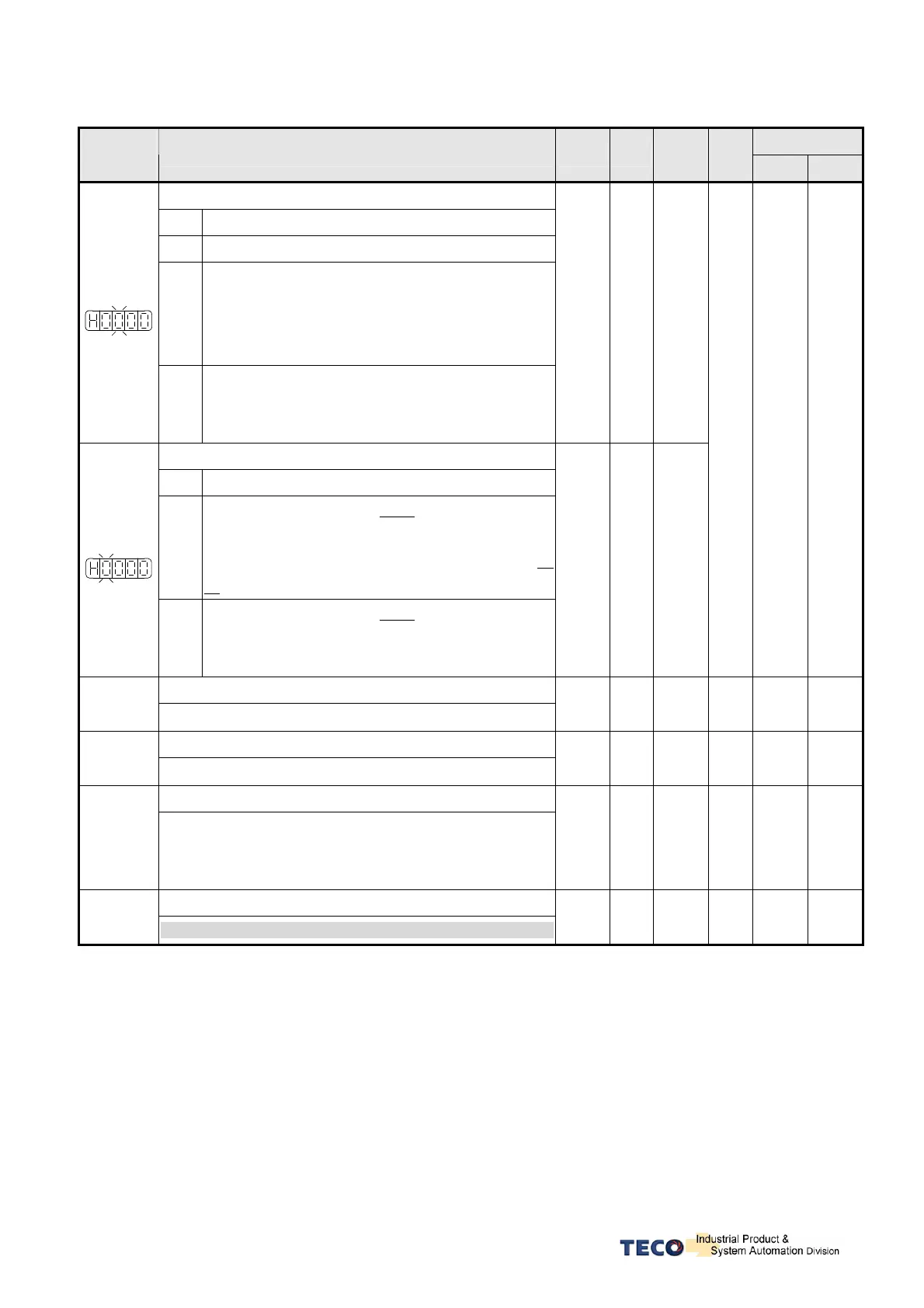
原點復歸啟動模式設定
原點復歸啟動模式設定原點復歸啟動模式設定
原點復歸啟動模式設定
設定
說明
0
關閉原點復歸機能。
1
電源開啟後,只有第一次啟動伺服(Servo ON)會自
動執行原點復歸機能。當伺服系統運轉中不須重複
執行原點復歸機能時,可以使用此模式省略一個用
來執行原點復歸機能的輸入接點。
Pn317.2
2
由輸入接點 SHOME 觸發原點復歸機能,在位置模
式下可隨時觸發輸入接點 SHOME 來執行原點復歸
機能。
0 X
0
│
2
找到機械原點後之停止模式設定
找到機械原點後之停止模式設定找到機械原點後之停止模式設定
找到機械原點後之停止模式設定
設定
說明
0
找 到 機 械 原 點 信 號 後 , 紀 錄
紀 錄紀 錄
紀 錄 此 位 置 為 機 械 原 點
(Un-16 編碼器迴授圈數、Un-14 編碼器迴授脈波數
皆為零),馬達減速停止,馬達停止後以第二段速折
折折
折
返
返返
返移動到機械原點位置。
Pn317.3
1
找 到 機 械 原 點 信 號 後 , 紀 錄
紀 錄紀 錄
紀 錄 此 位 置 為 機 械 原 點
(Un-16 編碼器迴授圈數、Un-14 編碼器迴授脈波數
皆為零),馬達減速停止。
0 X
0
│
1
Pi
Pe
54AH
0311H
原點復歸第
原點復歸第原點復歸第
原點復歸第一段高速
一段高速一段高速
一段高速
Pn318
設定原點復歸第一段移動速度
100
rpm
0
│
2000
Pi
Pe
54BH
0312H
原點復歸第二段低速
原點復歸第二段低速原點復歸第二段低速
原點復歸第二段低速
Pn319
設定原點復歸第二段移動速度
50 rpm
0
│
500
Pi
Pe
54CH
0313H
原點復歸偏移圈數
原點復歸偏移圈數原點復歸偏移圈數
原點復歸偏移圈數
Pn320
當馬達依照 Pn317(原點復歸模式)找到機械原點後,會再
依照 Pn320(原點復歸偏移圈數)和 Pn321(原點復歸偏移脈
波數)定位作為新的機械原點。
0 rev
-30000
│
30000
Pi
Pe
54DH
0314H
原點復歸偏移脈波數
原點復歸偏移脈波數原點復歸偏移脈波數
原點復歸偏移脈波數
Pn321
原點復歸偏移位置
原點復歸偏移位置原點復歸偏移位置
原點復歸偏移位置=Pn320(圈數
圈數圈數
圈數)x 編碼器一轉脈波數
編碼器一轉脈波數編碼器一轉脈波數
編碼器一轉脈波數 x4+Pn321(脈波數
脈波數脈波數
脈波數)
0 pulse
-32767
│
32767
Pi
Pe
54EH
0315H
 Loading...
Loading...

