34
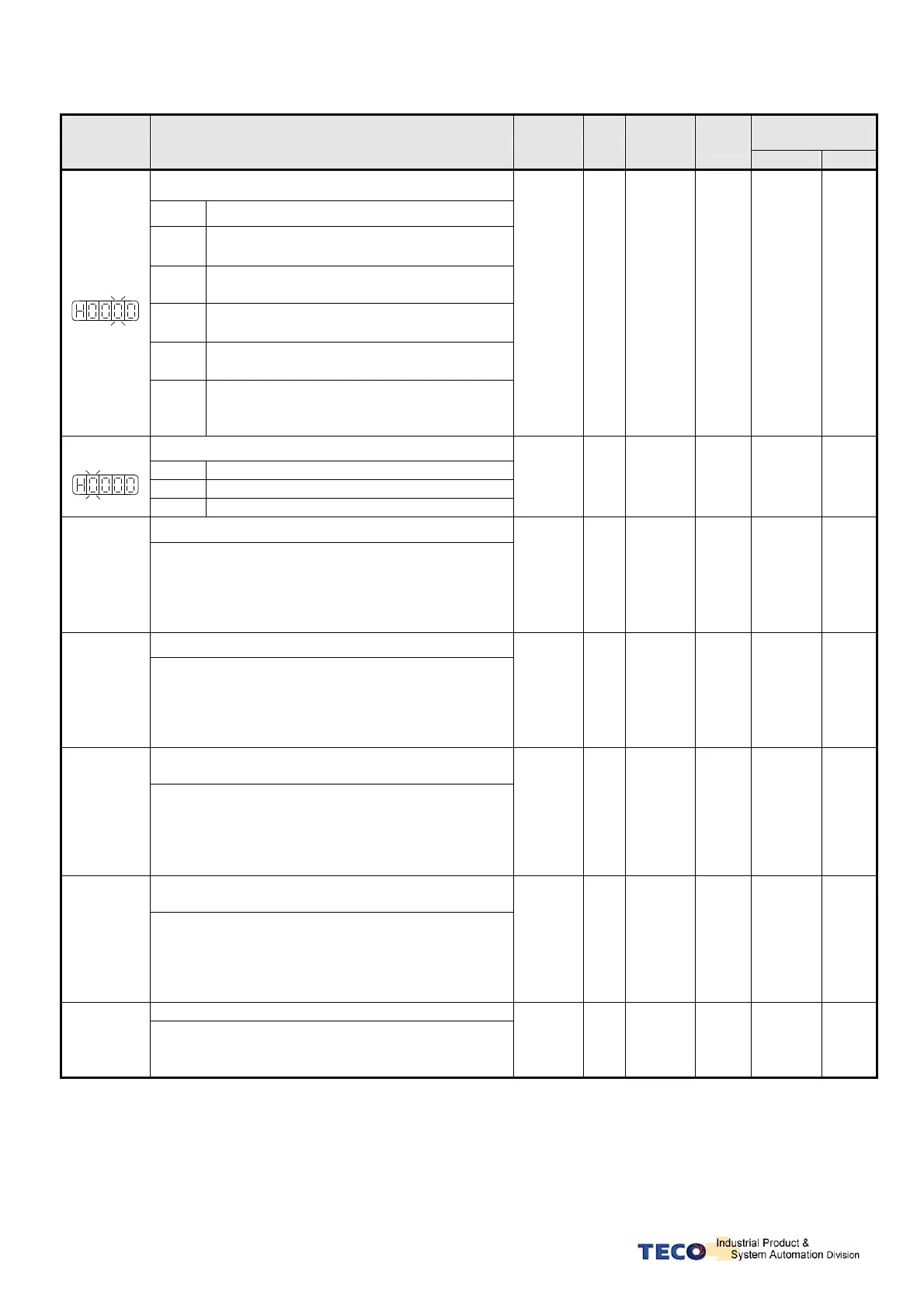
Communication
Address
Parameter
Name & Function Default
Unit
Setting
Range
Contro
Mode
RS232
RS485
Automatic gain 1& 2 switch
Setting
Explanation
0
Switch from gain 1 to 2 if torque
greater than Cn021.
1
Switch from gain 1 to 2 if speed
greater than Cn022.
2
Switch from gain 1 to 2 if acceleration
command is greater than Cn023.
3
Switch from gain 1 to 2 if position error
value is greater than Cn024.
Cn015.1
4
Switch from gain 1 to 2 by
G-SEL.
Set one of the multi function
terminals to option 15.
4 X
0
│
4
Pi
Pe
S
C07H 000FH
Automatic gain proportion switch
Setting
Explanation
0 JSDEP new automatic gain proportion
Cn015.3
1 JSDEP old automatic gain proportion
0 X
0
│
1
ALL
C07H 000FH
PI/P control mode switch by Torque Command
Cn016
Set the Cn015.0=0 first.
If Torque Command is less than Cn016 PI control is
selected.
If Torque Command is greater than Cn016 P control
is selected.
200 %
0
│
399
Pi
Pe
S
C4BH 0010H
PI/P control mode switch by Speed Command
Cn017
Set the Cn015.0=1 first.
If Speed Command is less than Cn017 PI control is
selected.
If Speed Command is greater than Cn017
is selected.
0 rpm
0
│
4500
Pi
Pe
S
C4CH
0011H
PI/P control mode switch by accelerate
Command
Cn018
Set the Cn015.0=2 first.
If Acceleration is less than Cn018 PI control is
selected.
If Acceleration is greater than Cn018
selected.
0 rps/s
0
│
18750
Pi
Pe
S
C4DH
0012H
PI/P control mode switch by
number
Cn019
Set the Cn015.0=3 first.
If Position error value is less than Cn019
selected.
If Position error value is greater than Cn019
is selected.
0 pulse
0
│
50000
Pi
Pe
S
C4EH 0013H
Automatic gain 1& 2 switch delay time.
Cn020
Speed loop 2 to speed loop 1, Change over delay,
when two control speed loops ( P&I gains 1 & 2) are
used.
0
x02
msec
0
│
10000
Pi
Pe
S
53CH 0014H
 Loading...
Loading...

