5-34
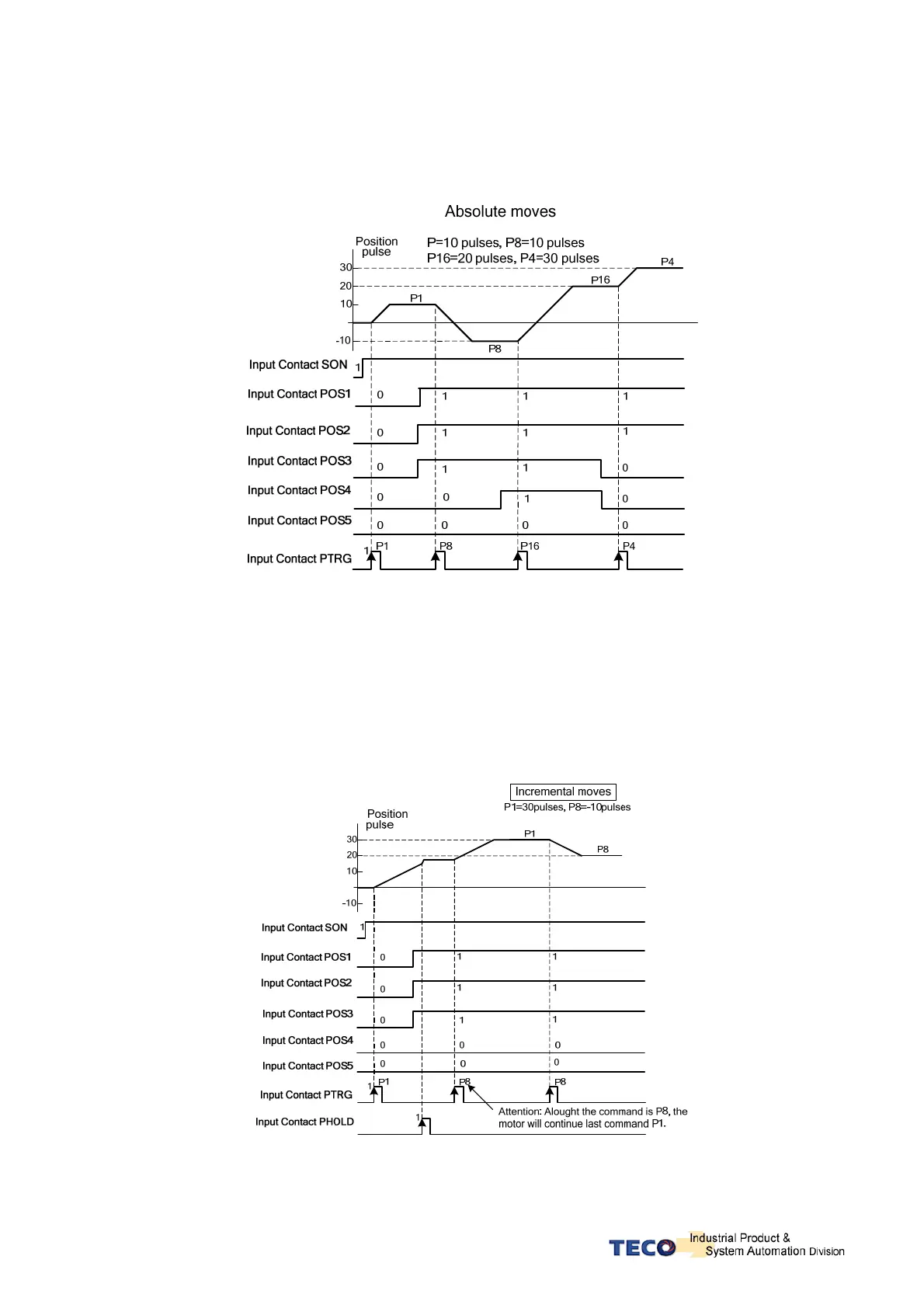
PTRG. (Position Trigger).
Once any preset position is selected by input contacts POS1~POS5 then require a trigger signal (PTRG)
from the input contact, enable PTRG to start operation.
Diagram below shows an example for 4 different absolute encoders.
Note: Input contacts status “1” (ON) and “0” (OFF)
Please check section 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.
PHOLD. (Position Hold)
The Position command can be inhibited (Held) at any time by input contact signal PHOLD.
Once PHOLD is initiated the motor will decelerate and stop.
As soon as the input contact PTRG is triggered again the original position command will be completed.
Diagram below shows PHOLD function with incremental encoder.