EVK-F9DR - User guide
UBX-23007618 - R01 Appendix Page 21 of 33
C1-Public
Appendix
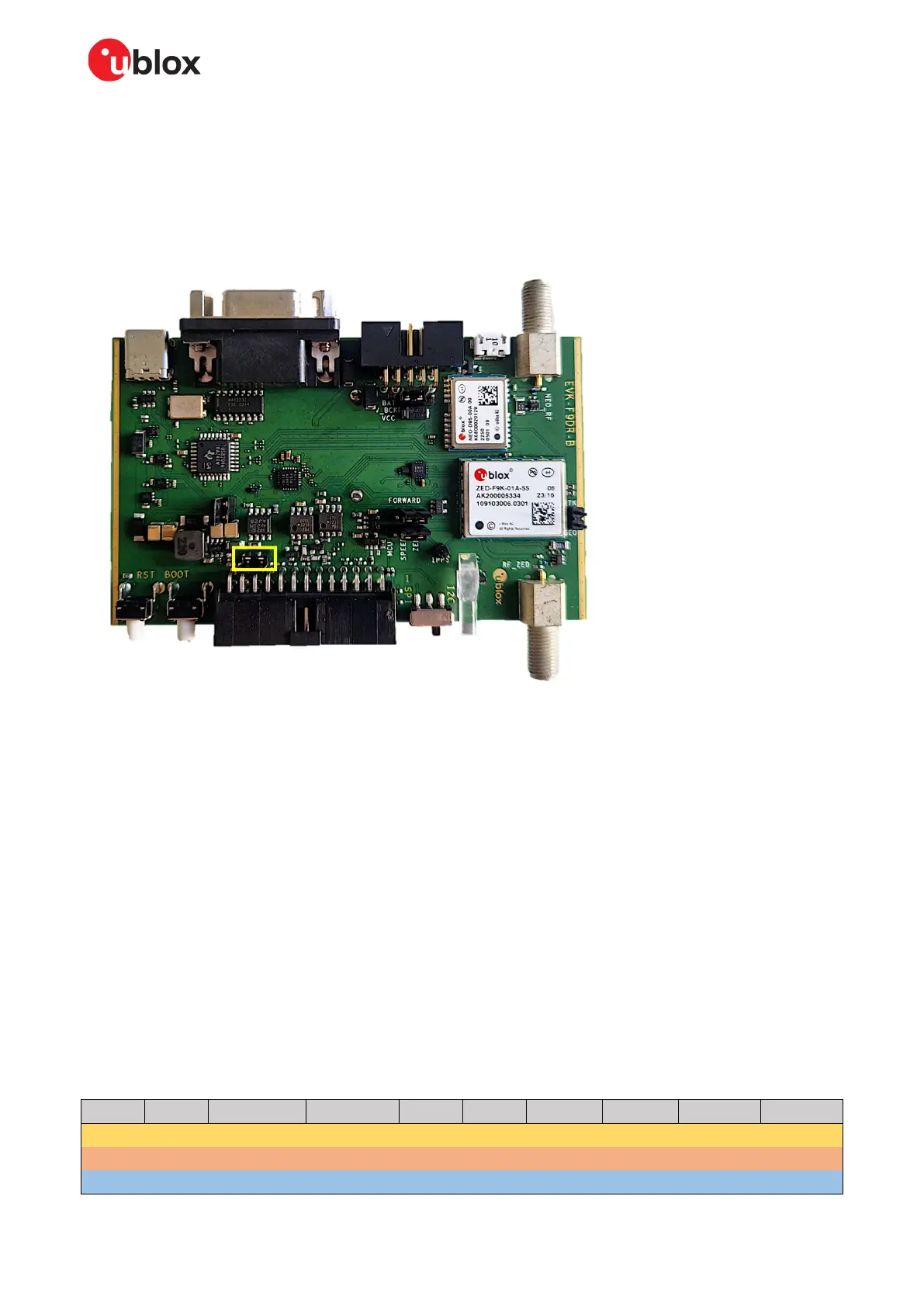
A CAN termination
The CAN bus is terminated by including the jumper marked in the image below. The jumper is included
by default. If the termination needs to be removed, open the enclosure and remove the jumper.
B CAN configuration examples
This appendix contains example CAN configurations. Each example uses the following settings for
the CAN bus:
• CAN bitrate: 500 kbps
• CAN message ID: 0x123
• DLC: 8
• Cycle time: 0 ms
The example messages are compatible with firmware C100 v1.0.
B.1 Wheel tick configurations
B.1.1 Two rear-wheel ticks and direction
This configuration uses wheel ticks from two rear wheels and a separate direction signal. The
configuration entries are described in the tables below.

 Loading...
Loading...