Smart WIFI Robot Car Kit for Arduino
51
www.uctronics.com
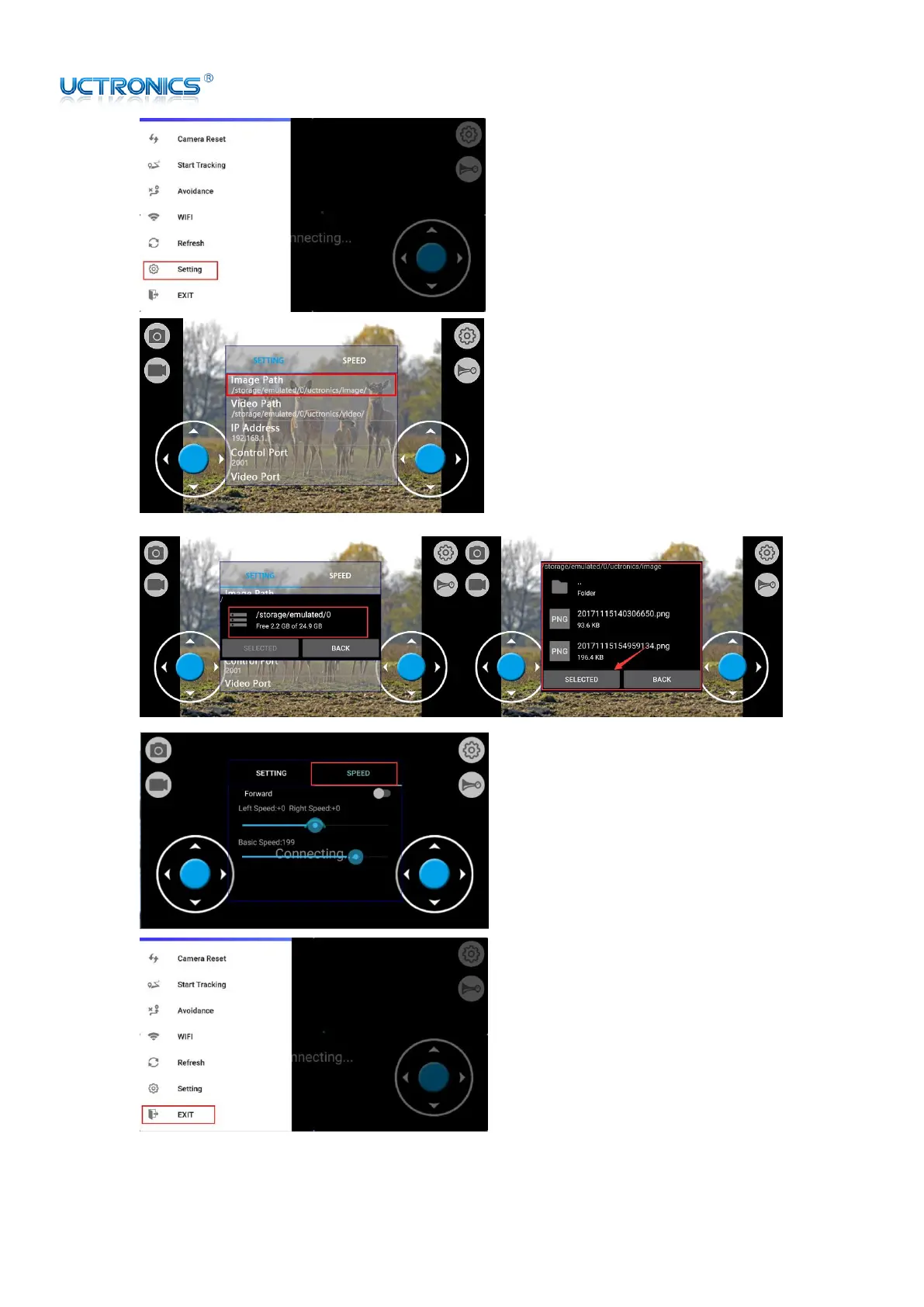
Basic setup
After click the setting button, you can
configure the Image path/Video path/IP
Address (192.168.1.1)/Control port (2001)
and Video Port.as normal you should not
change the default IP Address /Control
port and Video port
Calibration and speed setting
You can change the value of Froward to
compensate for the speed difference of
the motor.
You can change the value of basic
speed to control the motor speed.
Exit the application
 Loading...
Loading...